1. 试验背景
目前国内的高精度 ADCP 设备主要依赖进口,尤其以美国 TRDI 公司系列的 ADCP 进口数量最多,占据了大部分的中国市场。为了摆脱这一被动局面,实现高 精度 ADCP 的国产化替代,开展本次比对试验。
经过调研,我司自主研发生产的 ADCP,型号为 PandaADCP,其综合性能号称可以媲美 TRDI Workhorse 系列 ADCP,故采用 PandaADCP-300K 和 Workhorse Sentinel ADCP-300K 进行比对测试。测试分为走航测量比测和静 态坐底测量比测两部分,通过实际测量结果比对,证明 PandaADCP 系列的高精度 ADCP 可以替代进口的高精度 ADCP。
2. 试验简介
国产 PandaADCP-300K 设备及进口 Workhorse Sentinel ADCP-300K 设备进行比测, 共分为两类比测:坐底式静态测试,另一类是走航式动态测试,在同一参数配置 下,同一应用环境下,对测流结果进行多维比测,综合误差小于 2%即为性能基本 一致。
2.1 试验目的
验证国产 PandaADCP-300K 设备无论是静态模式下测底,还是走航模式下测流性 能与进口 Workhorse Sentinel ADCP-300K 基本一致,两者测量的水流速度值的 相对偏差小于2%。
2.2 试验时间
2023 年 3 月 21 日~2023 年 3 月 23 日,为期 3 天。
2.3 实验地点:
淳安县千岛湖镇东南湖区:

图 2.3 、千岛湖东南湖码头位置图
2.4 试验设备:
- PandaADCP-300K 一套;
- Workhorse Sentinel ADCP-300K 一套; lGPS 一套;
- 移动电池两套。
2.5 试验方式
- 坐底式测试;
- 走航式测试。
3. 试验内容
PandaADCP-300K 及 Workhorse Sentinel ADCP-300K 比测试验共有两种测试方式, 坐底式及走航式,坐底式试验将两台设备装到支撑架上,交替发射比测,而走航 式则是 PandaADCP-300K 安装在船的右舷,Workhorse Sentinel ADCP-300K 安装在船 的左舷,依然是交替发射进行比测。
3.1 坐底式比测实验
3.1.1 试验过程
静态测试区域水深 70m 左右,布放区域由PandaADCP进行扫湖后确认,扫湖结果 如下图所示。
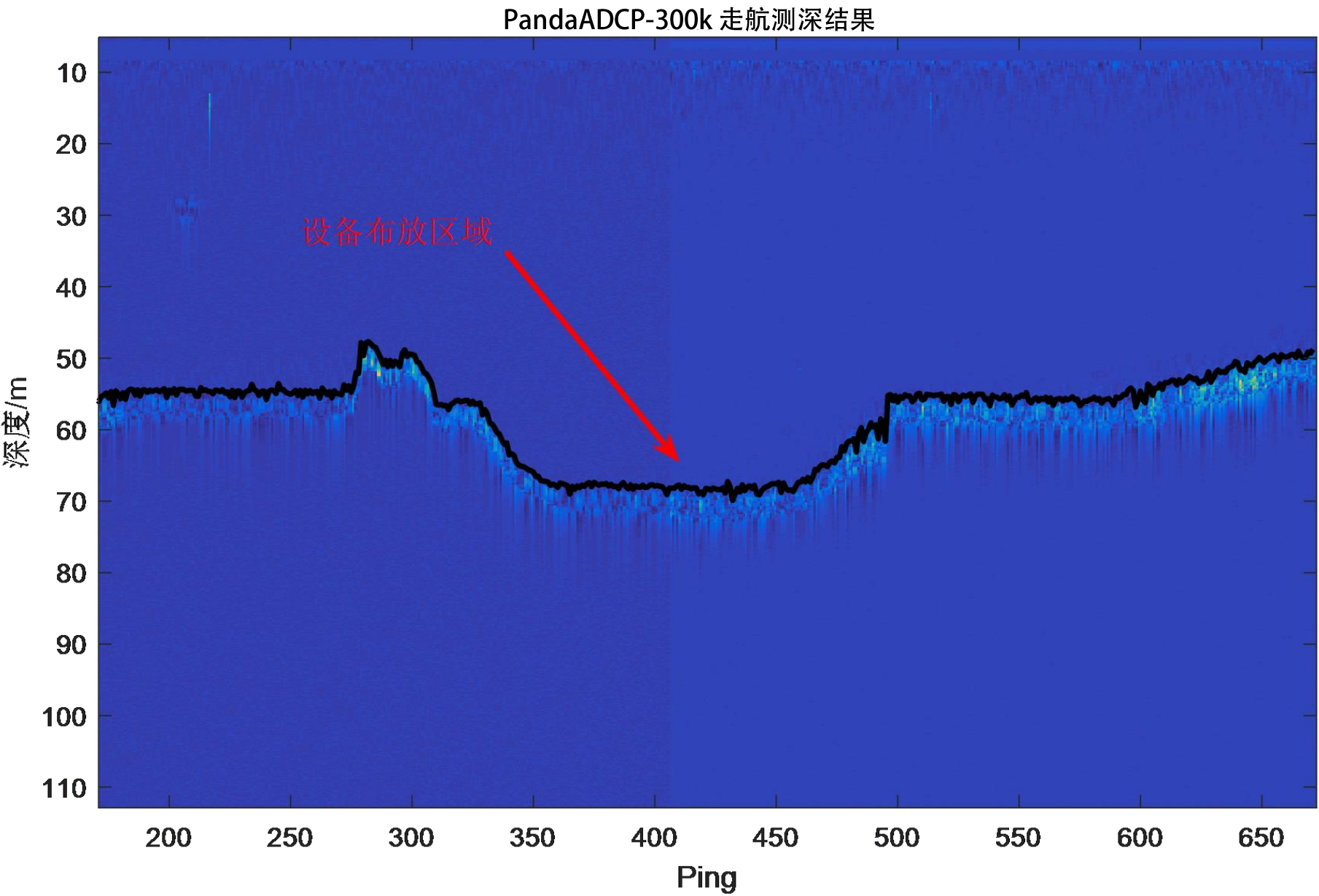
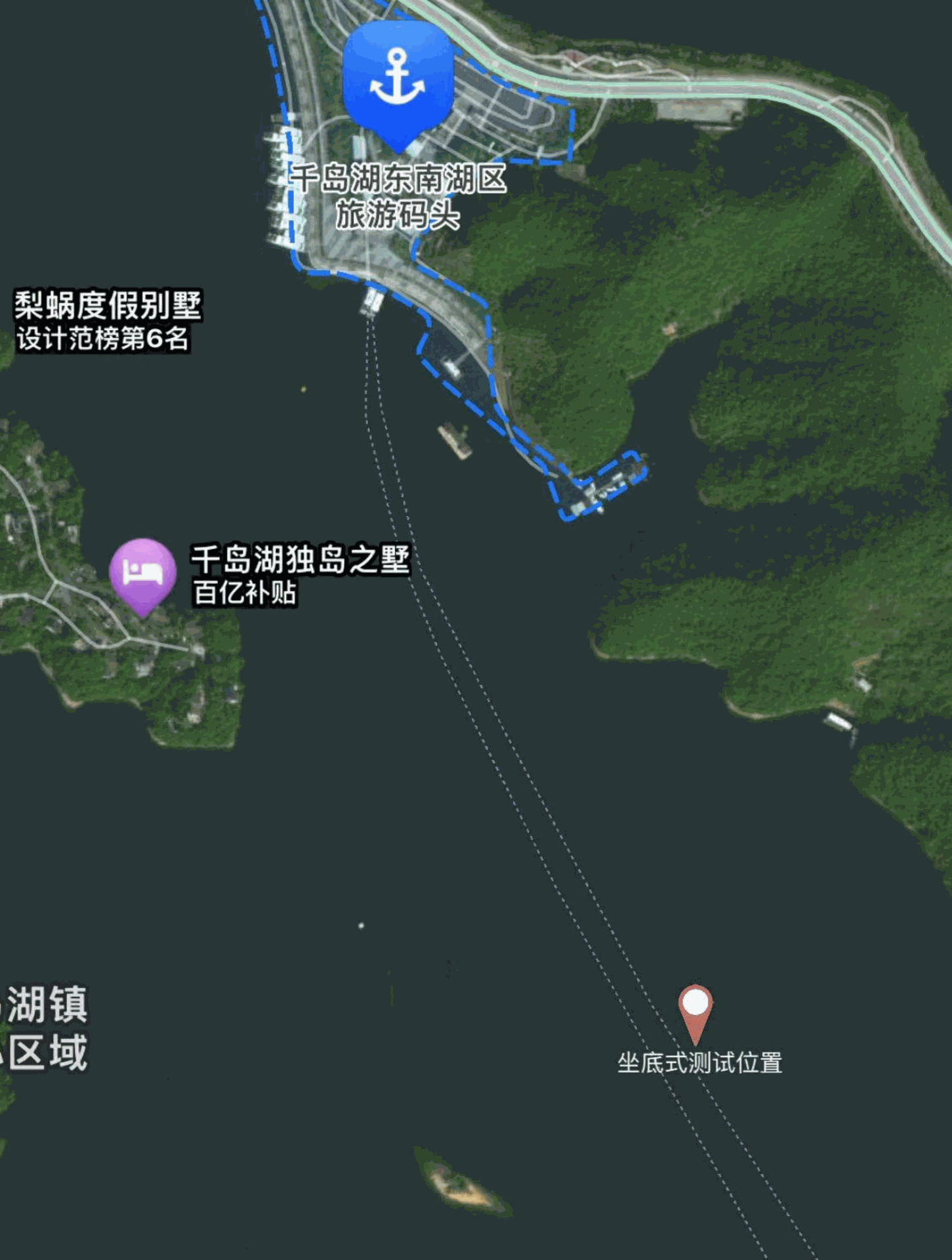
图 3. 1. 1 、设备布放区域图
2023 年 3 月 21 日上午 10:30 分开始整备 PandaADCP-300K 及 Workhorse Sentinel ADCP-300K 设备物料,为保证设备放入水里再开始工作就要将 PandaADCP-300K 设备开 启时间设置为 1.5 小时后也就是 12:00 正式启动,也为安装到支撑架及驶至测 试环境预留了足够的时间。
此次测试采用交替工作方式,保证每台设备每五分钟工作一次,现设置 PandaADCP-300K 设备启动时间为 12:00,那么 Workhorse Sentinel ADCP-300K 启动 时间则是 12:07,两台设备第一次输出结果是按照运算周期(2s)*测流 ping 数(150 次)即为 5 分钟,在第一次输出结果后面的每次输出时间都是按照工作 周期 TB(设置为 15 分钟)来运行,两台设备工作时间不低于 24 小时。
安装前准备物料: 电池、缆线、PandaADCP-300K 设备、Workhorse Sentinel ADCP-300K 设备,固定设备铜螺柱、螺母、橡胶垫、凯夫拉绳、浮球、坐底式支 撑架。
提前将 PandaADCP-300K 及 Workhorse Sentinel ADCP-300K 装配孔打好用于装配 设备,先将橡胶垫及设备孔位对齐,然后用长度适合的螺柱进行固定,再给每个 螺柱装配两个螺母以防松掉从而致使设备脱落,将电池舱用凯夫拉绳牢牢固定在 对应位置,再将 PandaADCP-300K 设备与电池用电缆相接,注意两台前进方向需完全 保持一致,此时设备已完全制备完成,再将支撑架四角绳子捆绑牢固并保证水平, 防止在放入湖底时发生侧翻。


图 3. 1.2 、码头安装设备过程图
在码头整备完成时间为 11:23 分,将整体支撑架放到船上并驶至测试区域;

到达测试区域时间为 11:40 分,开始将设备投入湖中;
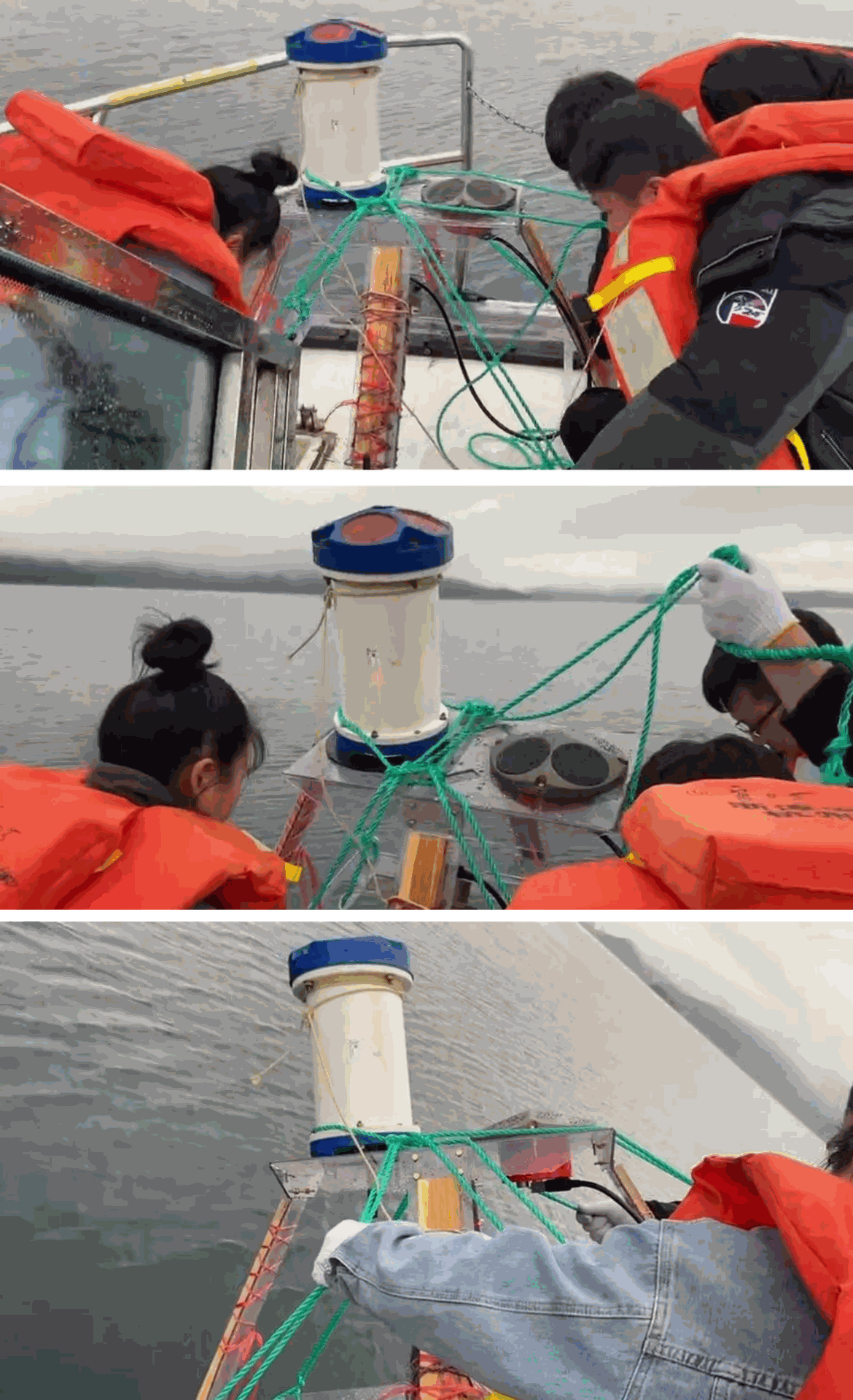

图 3. 1.5 、设备布防成功图
设备到达湖底即可将浮球放入湖中,支撑架的绳子与浮球相连,当回收设备 时找浮球位置即可。
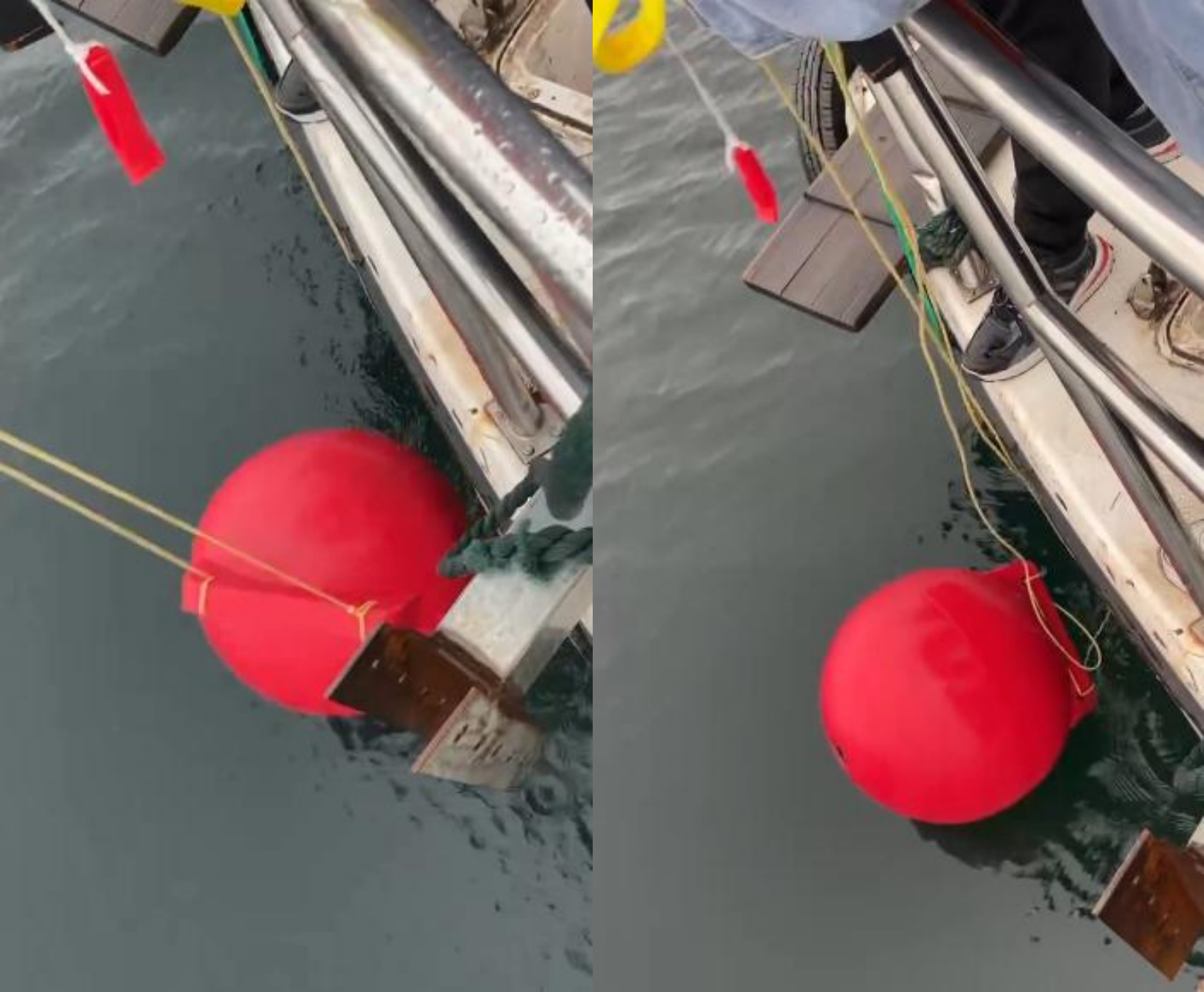

图 3. 1.6 、浮球(设备)位置图
2023 年 3 月 21 日下午 13:00 前往测试地点回收设备;

图 3. 1.7 、回收浮球(设备)位置图

图 3. 1.8 、回收设备过程图
备注:参数配置
PandaADCP-300K 启动时间 TG: 2023 年 3 月 21 日 12:00:00
Workhorse Sentinel ADCP-300K 启动时间 TG: 2023 年 3 月 21 日 12:07:00

定义:
EU:设置设备朝向(1--朝上、0--朝下);
TB:设置 ping 与 ping 之间的间隔,即工作周期;
TP:设置 ping 与 ping 之间的间隔,即发射周期;
WP:设置测流的 ping 数;
WN:设置层数;
WS:设置层厚;
EX:设置坐标系,0x11 代表大地坐标系;
TO:设置工作时长;(配合 TG 使用)
TG:设置设备开始工作时间。
3.1.2 试验结果
PandaADCP 和 Workhorse 两款 300K 的 ADCP,均采用 PD0 的输出格式。为了使比 对的结果更加精确,利用Matlab 分别将两台设备存储的结果数据进行解包、比 对分析。
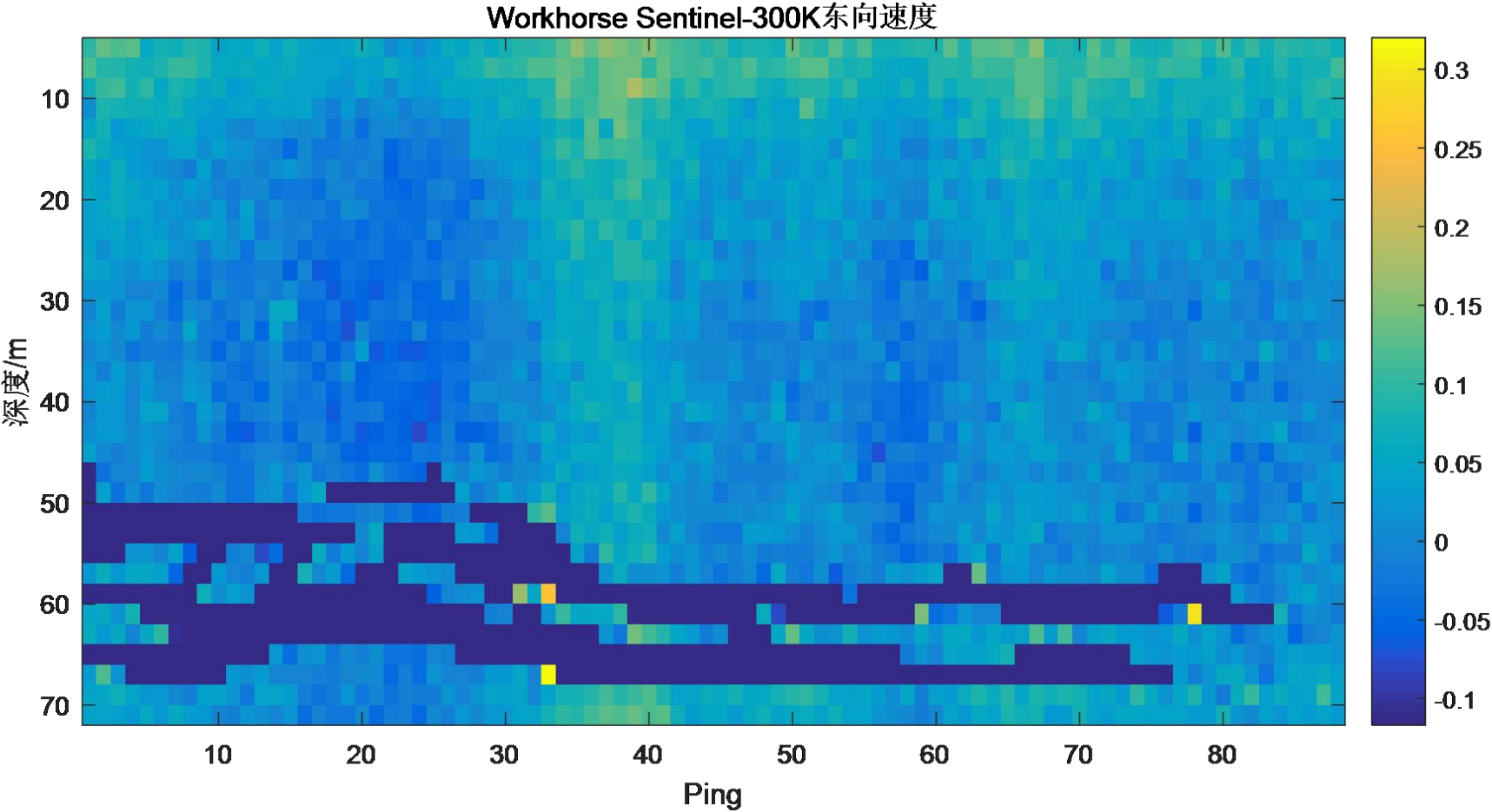

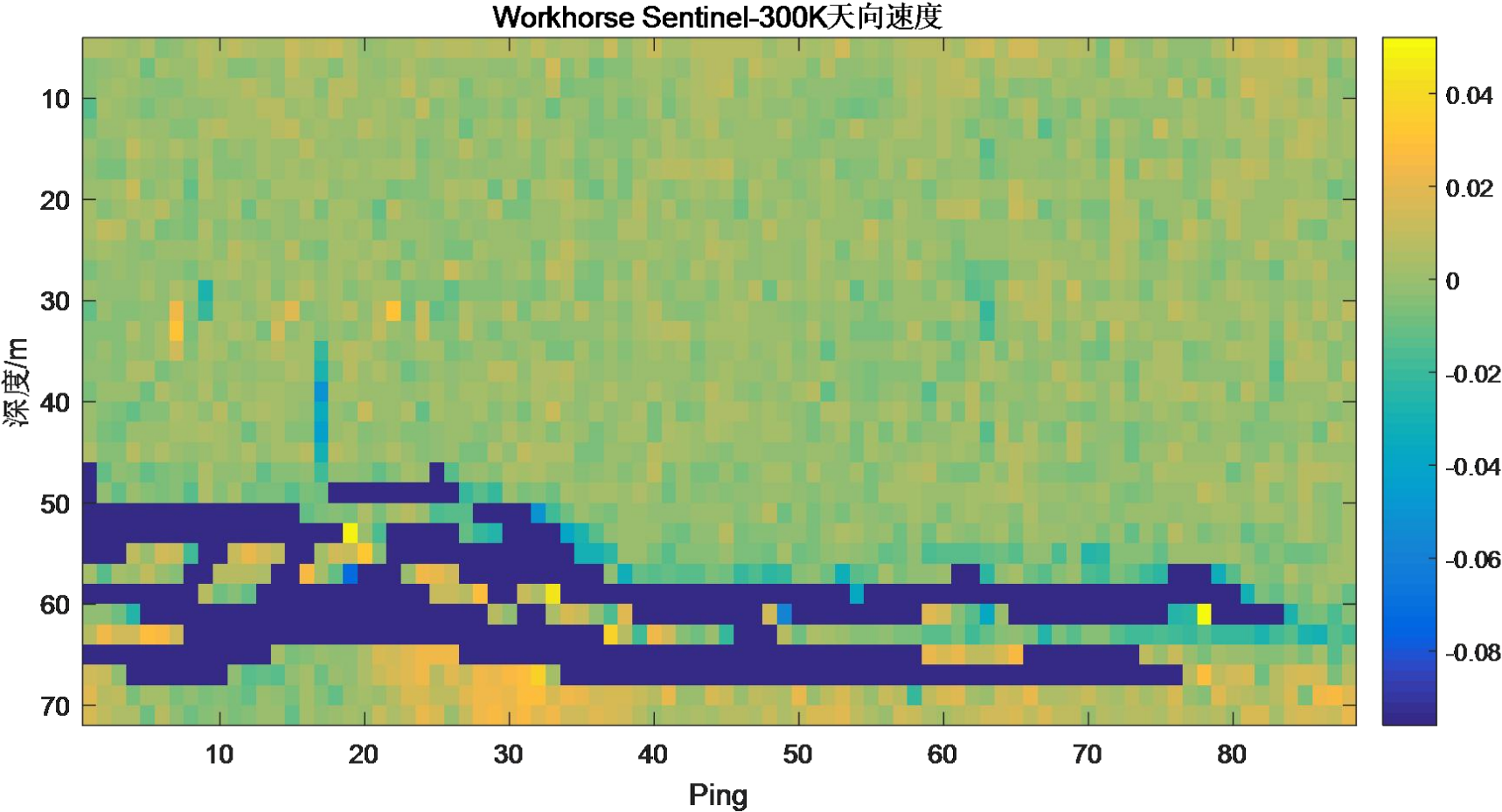
图 3. 1.9 、Workhorse 静态测流结果

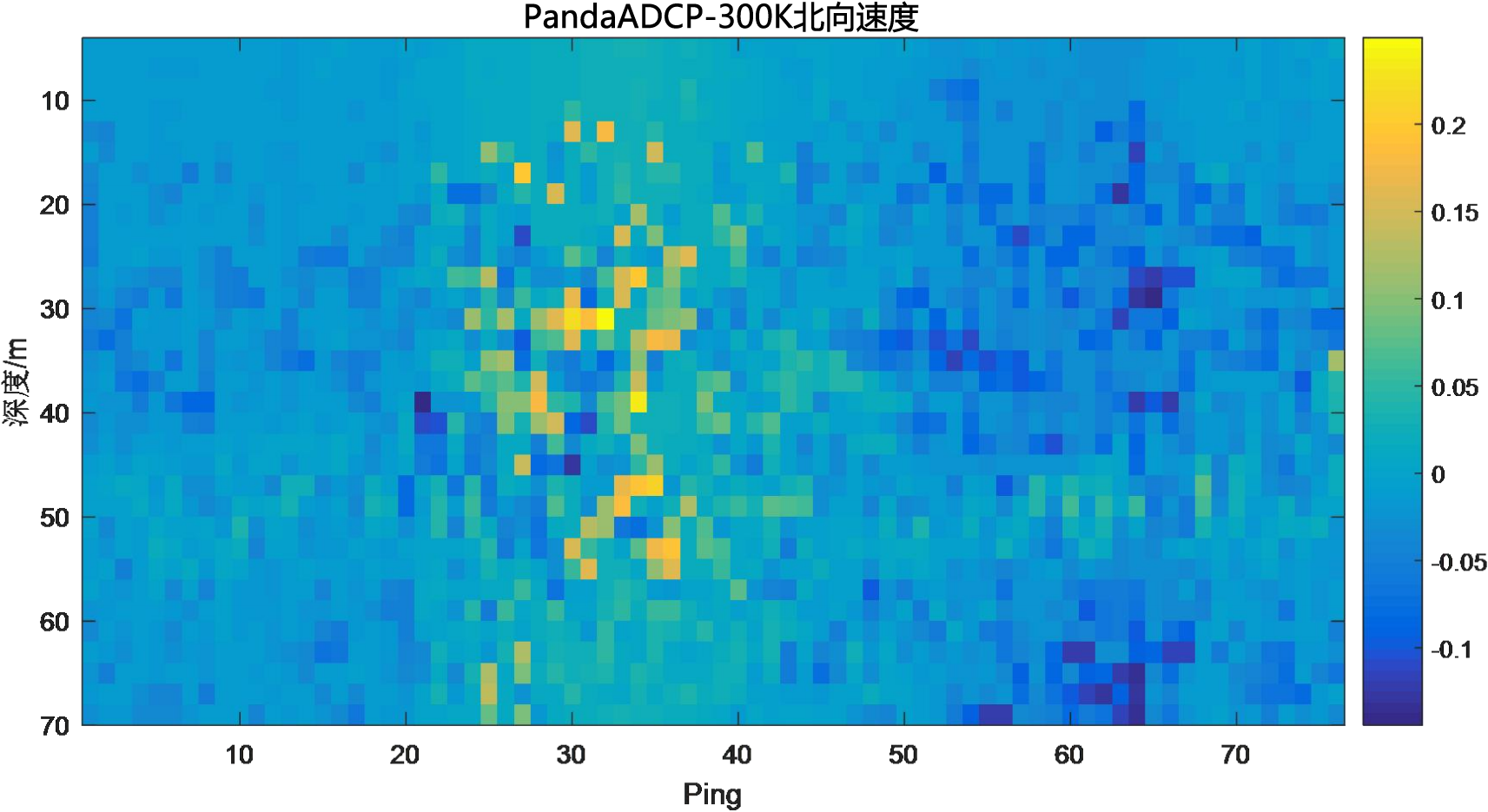

图 3. 1.10 、PandaADCP 静态测流结果图
从测流结果的历程图可以看出,两台设备的静态测流范围基本一致,东向速 度 为 -0.1m/s~0.3m/s , 北 向 速 度 为 -0.2m/s~0.3m/s , 天 向 速 度 为 -0.08m/s~0.04m/s。
分别将三向速度所有测流 Ping 的结果进行统计分析,结果如下;

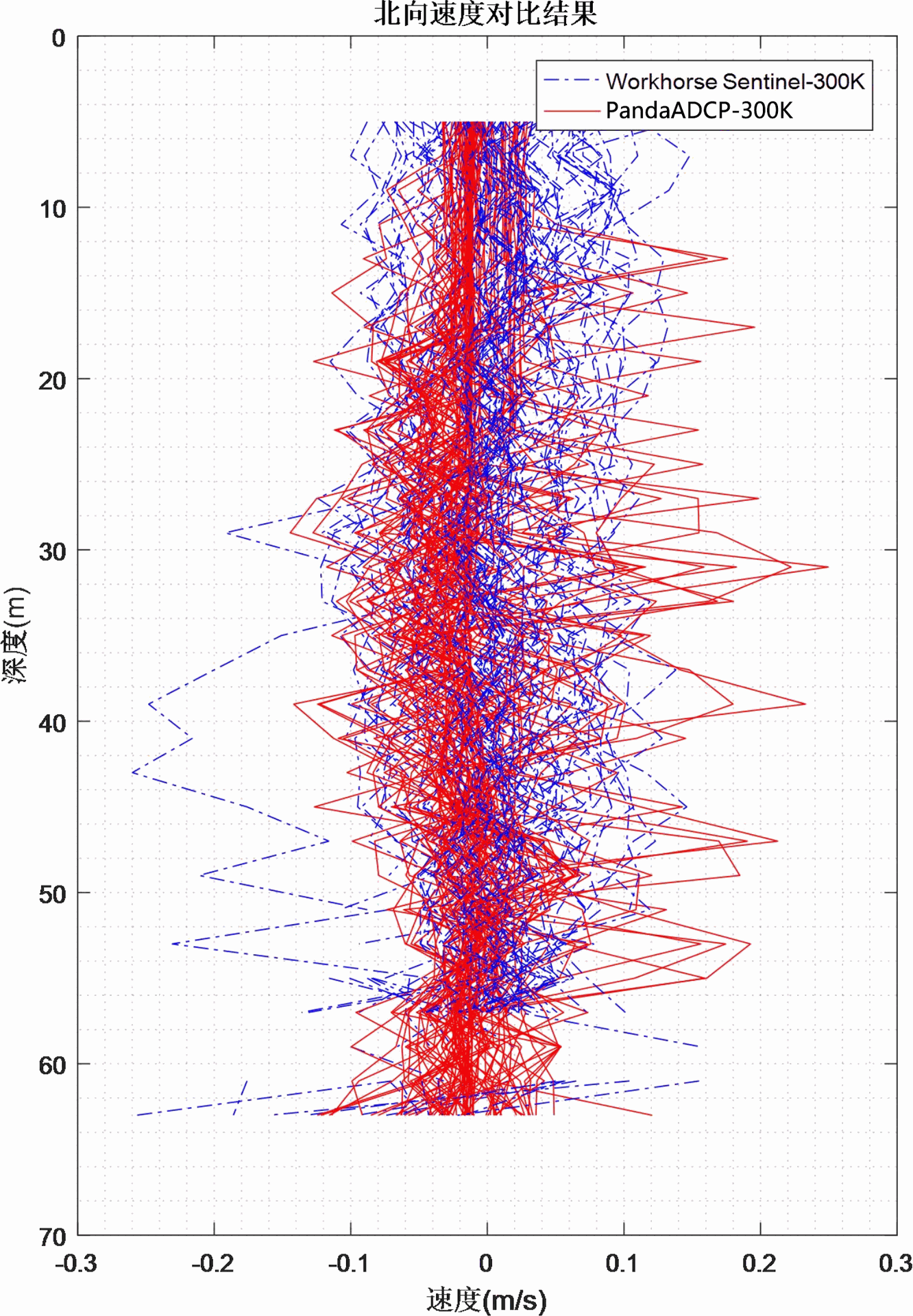
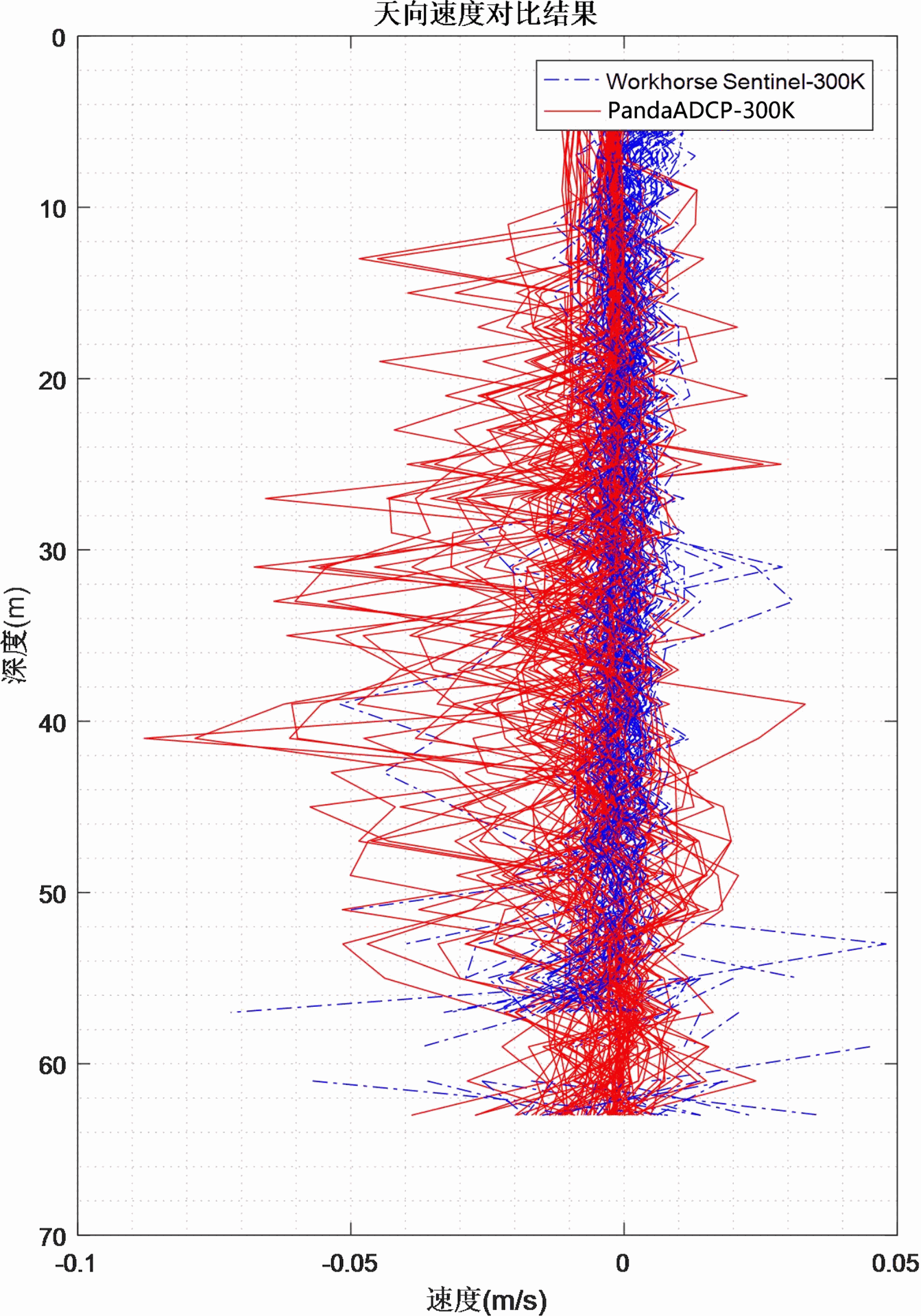
图 3. 1. 11 、三向速度多 Ping 测流结果图
从多 Ping测流结果也可以看出,两台设备的静态测流范围基本一致。 最后统计各 Ping测流的三向平均误差绝对值和误差率,如下图所示。
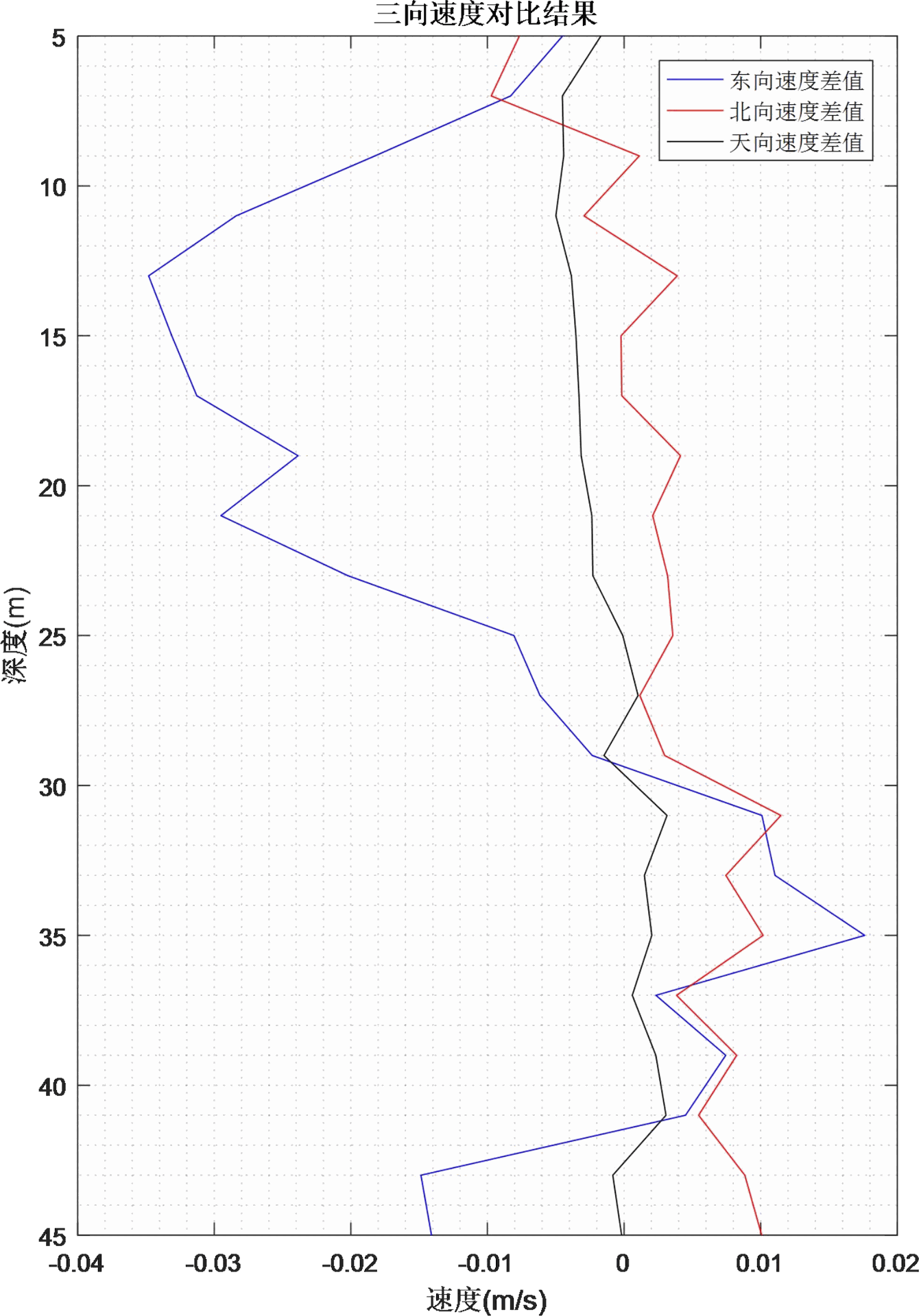
图 3. 1. 12 、三向速度相对偏差图
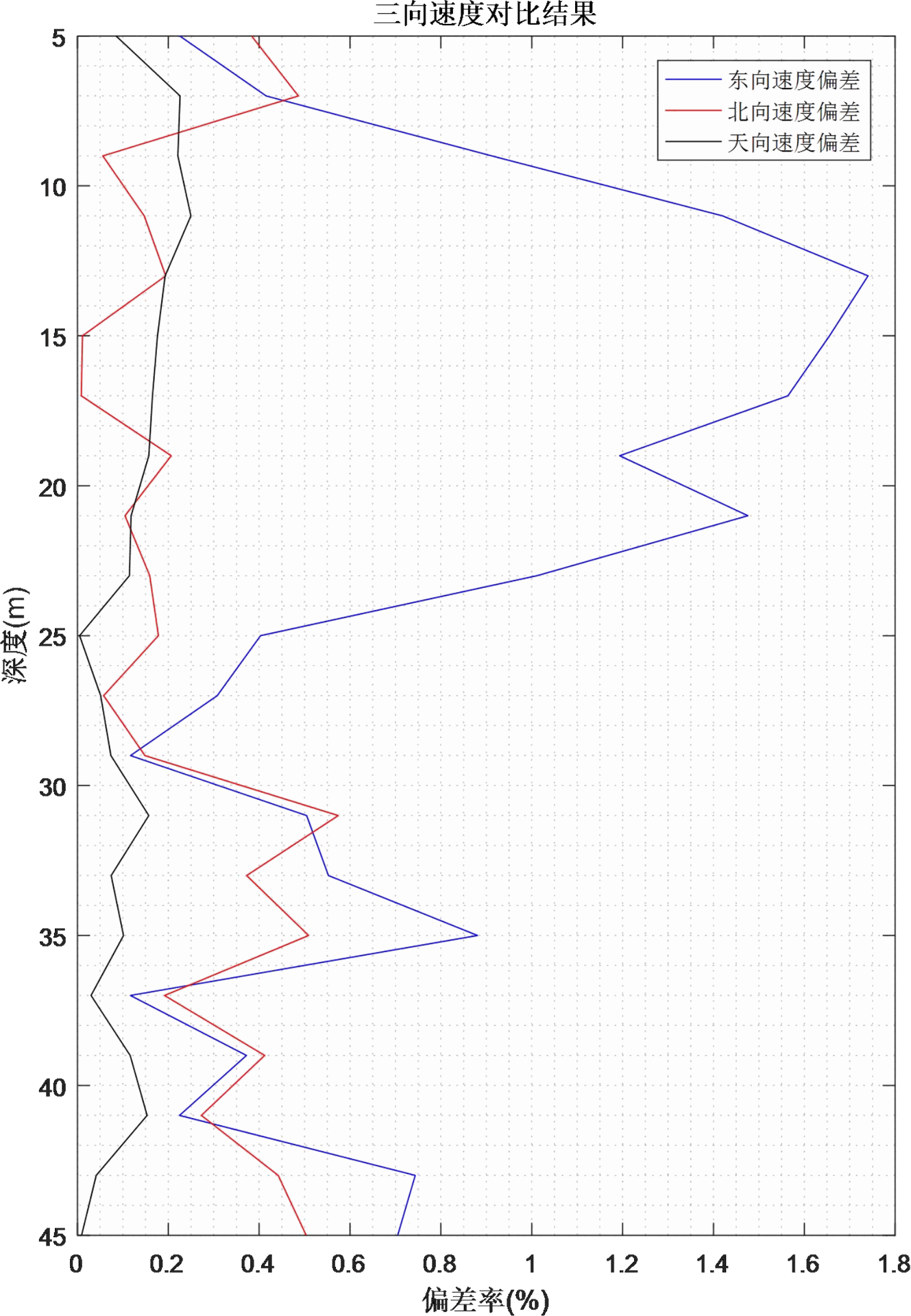
图 3. 1.13 、三向速度偏差率图
在坐底静态测流模式下,两台设备在大地坐标系下测量的水流速度值的相对 偏差小于 2%,可认定在静态测流模式下,PandaADCP 性能与 Workhorse 性能基本一致,满足国产化替代的要求。
3.2 走航式动态测试
3.2.1 试验过程
2023 年 3 月 24 日上午 9:00 开始固定 PandaADCP-300K 及 Workhorse Sentinel ADCP-300K 设 备 。PandaADCP-300K 设 备 安 装 在 船 的 右 舷 ,Workhorse Sentinel ADCP-300K 设备安装在船的左舷,首先安装进口设备,在码头上将其电缆穿过固 定杆内部以防在航行过程中受到水的阻力对缆线产生拽拉影响,然后将设备与固 定杆安装好,在固定杆与设备之间安装橡胶垫以防设备表面受到损坏,固定设备 时每个螺柱上需装配两个螺母以防设备在航行过程中脱落。

设备与固定杆安装完成后还要和船进行固定,首先将固定杆移至船头,使固 定杆与船上的固定架孔位对齐,并插入 M8 长螺柱将其固定在船上,装螺栓的时候务必注意固定杆中的缆线,将所有孔位都安装上螺栓螺母,以防设备在航行过 程中晃动从而影响测量数据的准确性。


图 3.2.2 、进口设备安装设备过程图
进口设备安装完成时间为上午 10:10 分,此时开始安装 PandaADCP-300K 设备, 和安装进口设备操作一致,同样将缆线从固定杆内穿过以防水的阻力太大拽拉缆 线,不同的操作是固定杆与船上的固定架先装配完成,直接将设备安装到固定架 即可,安装完毕即可将设备放入水中。


图 3.2.3 、国产设备安装过程图

设备制备好还需安装并调试 GPS,定制固定架有 GPS 专用螺杆,将 GPS 旋入 螺杆,串口通信线引入船舱内,连接电脑并配置好 GPS 所需输出模式 GPRMC,输 出频率 1Hz。

图 3.2.5 、GPS 安装图
图 3.2.6 、软件整备图
国产 PandaADCP-300K 设备、进口 Workhorse Sentinel ADCP-300K 及 GPS 所有准 备工作都已完成,时间为 11:00,准备进入走航模式测试。


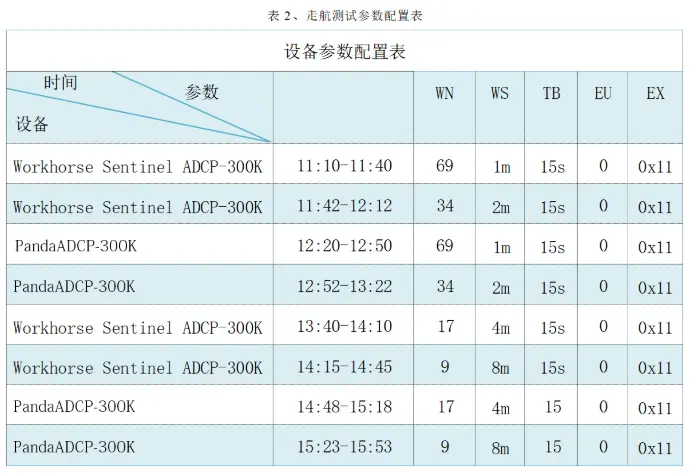
此次走航比测共测八组,PandaADCP-300K 四组,Workhorse Sentinel ADCP-300K 四组,两台设备的前两组都是由东南湖码头驶至东南湖 70 米深区域(由南至北) 进行往返走航,后两组是由距离码头 500 米左右驶至千岛湖农夫山泉取水附近区 域进行往返走航。
走航比测也是采用交替发射工作方式,保证互不干涉。
进口设备领先工作,在 11:10-11:40 时段,由码头开往 70 米深区域,分辨 率为 1m,在 11:42-12:12 时段,返航,分辨率设置为2m。PandaADCP-300K在 12:20-12:50 时段是由码头开往 70 米深区域,分辨率也是 1m,返航时时间为 12:52-13:22 时 间段 ,此 时分辨率为 2m 。在 13:40-14:10 时 间段 ,Workhorse Sentinel ADCP-300K 分辨率为 4m,回程分辨率设置为 8m,在时间段 14:48-15:18 PandaADCP-300K开始工作,分辨率设置为4m,是由距离码头 500 米左右驶至千岛湖农夫山泉取水 附近区域,返航时分辨率设置为8m。具体参数设置见下表:
定义:
EU:设置设备朝向(1--朝上、0--朝下);
TB:设置 ping 与 ping 之间的间隔,即工作周期;
WN:设置层数;
WS:设置层厚;
EX:设置坐标系;
走航测试完成时间为 16:30(到达码头),开始拆设备

图 3.2.10 、拆卸 Workhorse Sentinel ADCP-300K 设备图
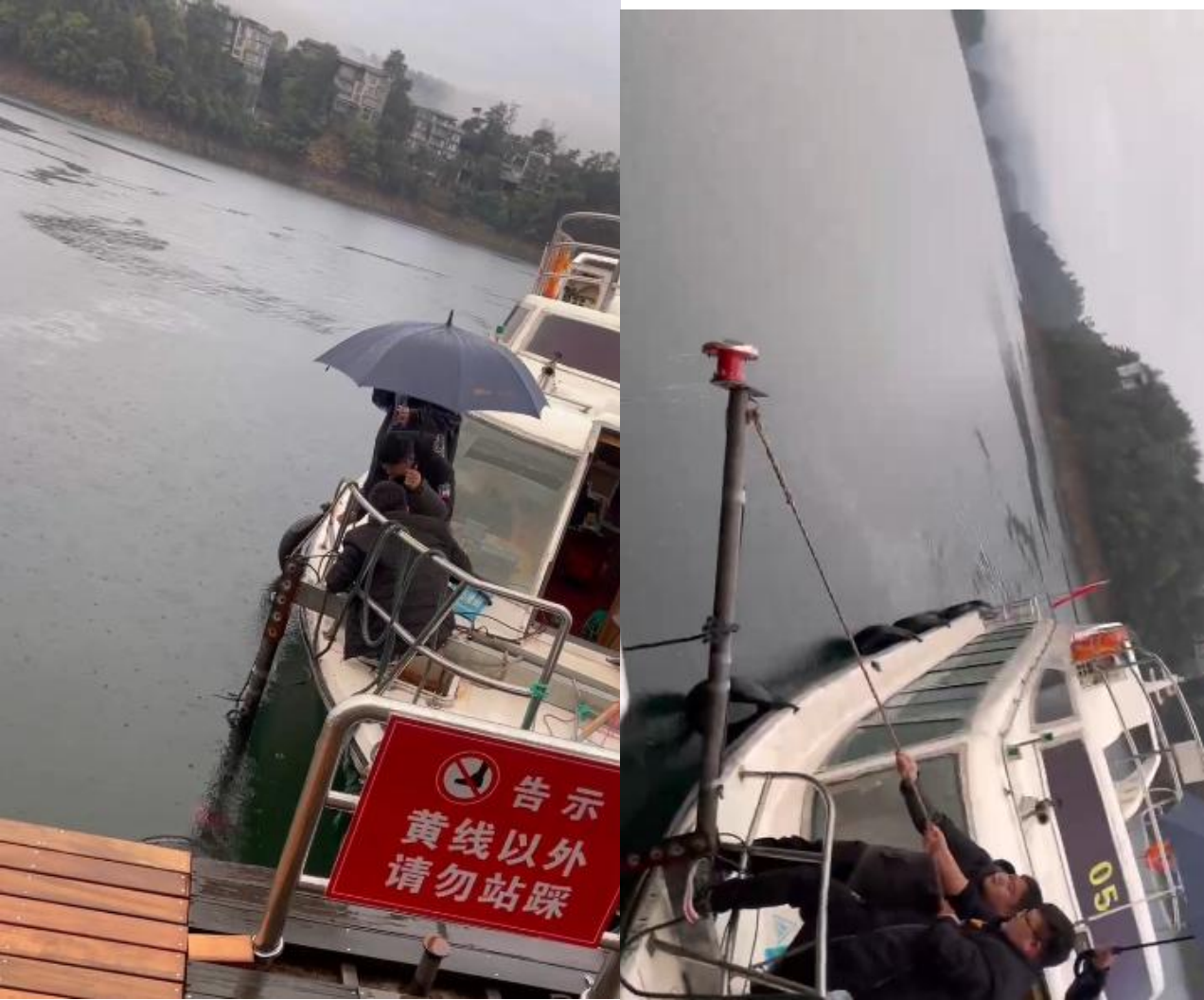
图 3.2. 11 、拆卸 PandaADCP-300K 设备图
3.2.2 试验结果
下面以 1m 和 2m 分辨率的测试结果进行详细比对,同样是用Matlab 对两台
设备存储的 PD0 结果进行解包、比对分析。
(1)1m 层厚测流结果比对
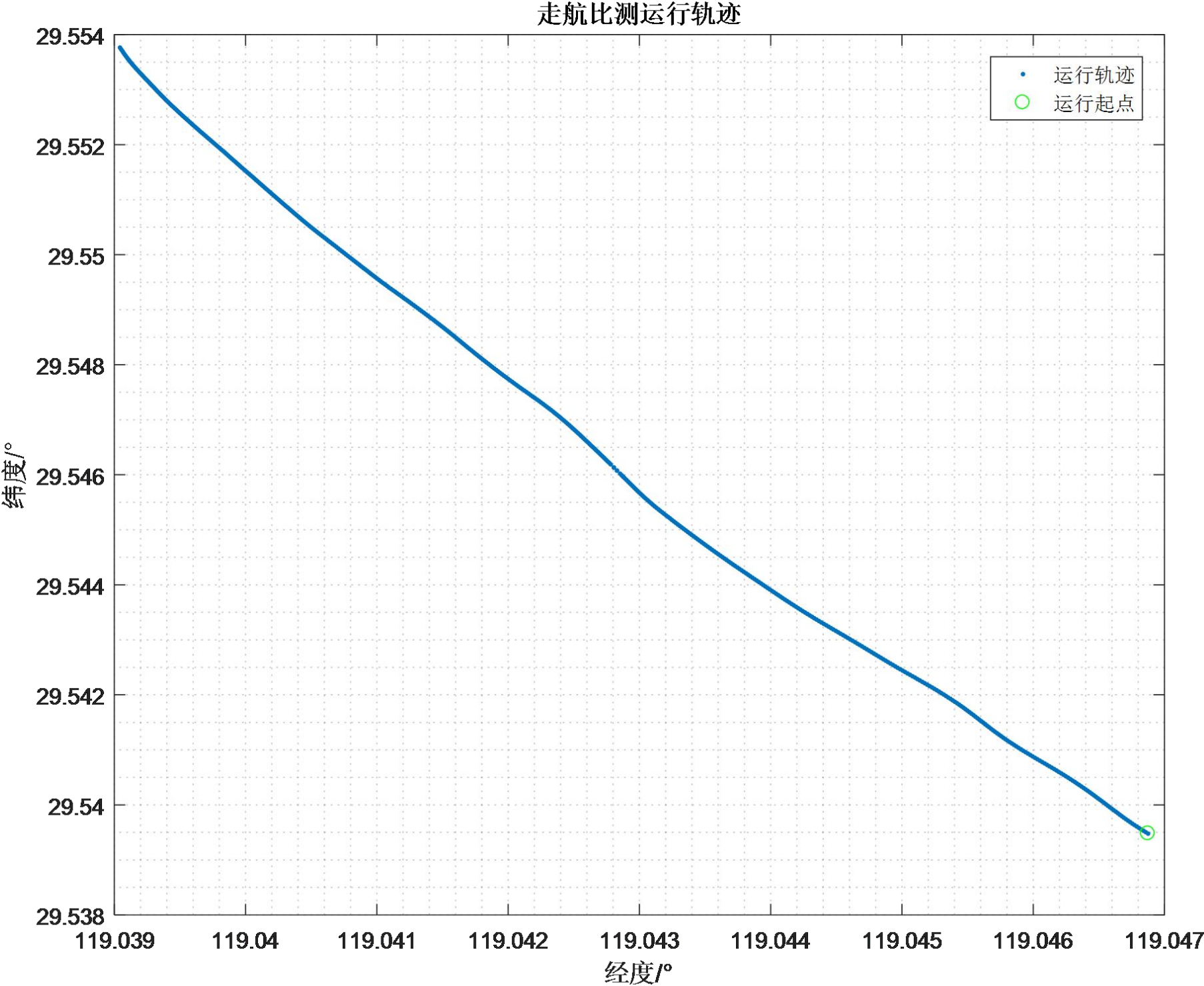
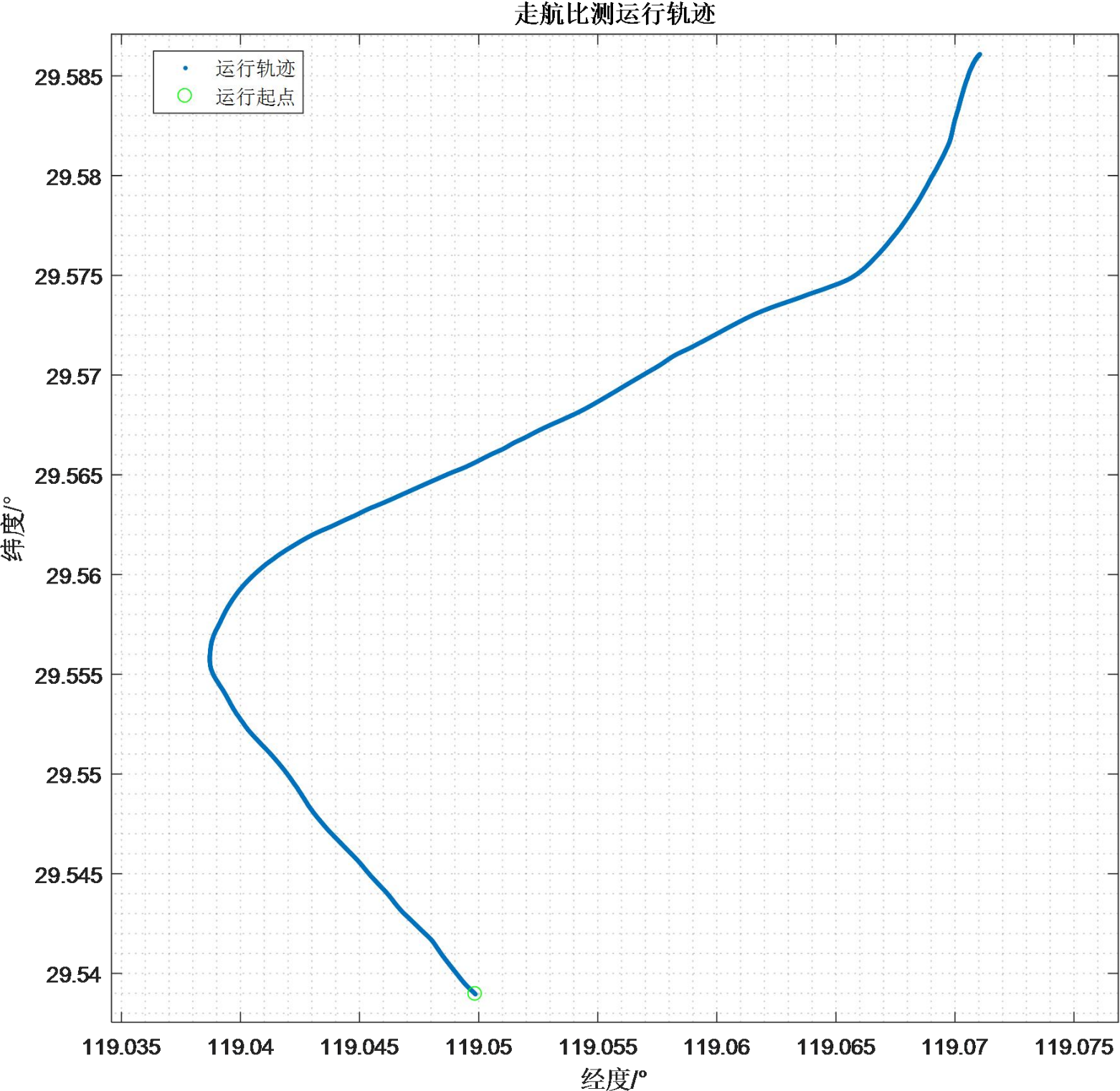
图 3.2. 12 、走航测流运行轨迹图-层厚 2m
从 GPS 记录的轨迹来看,1m 分辨率比测过程整体的运行轨迹从东南往西北运动。
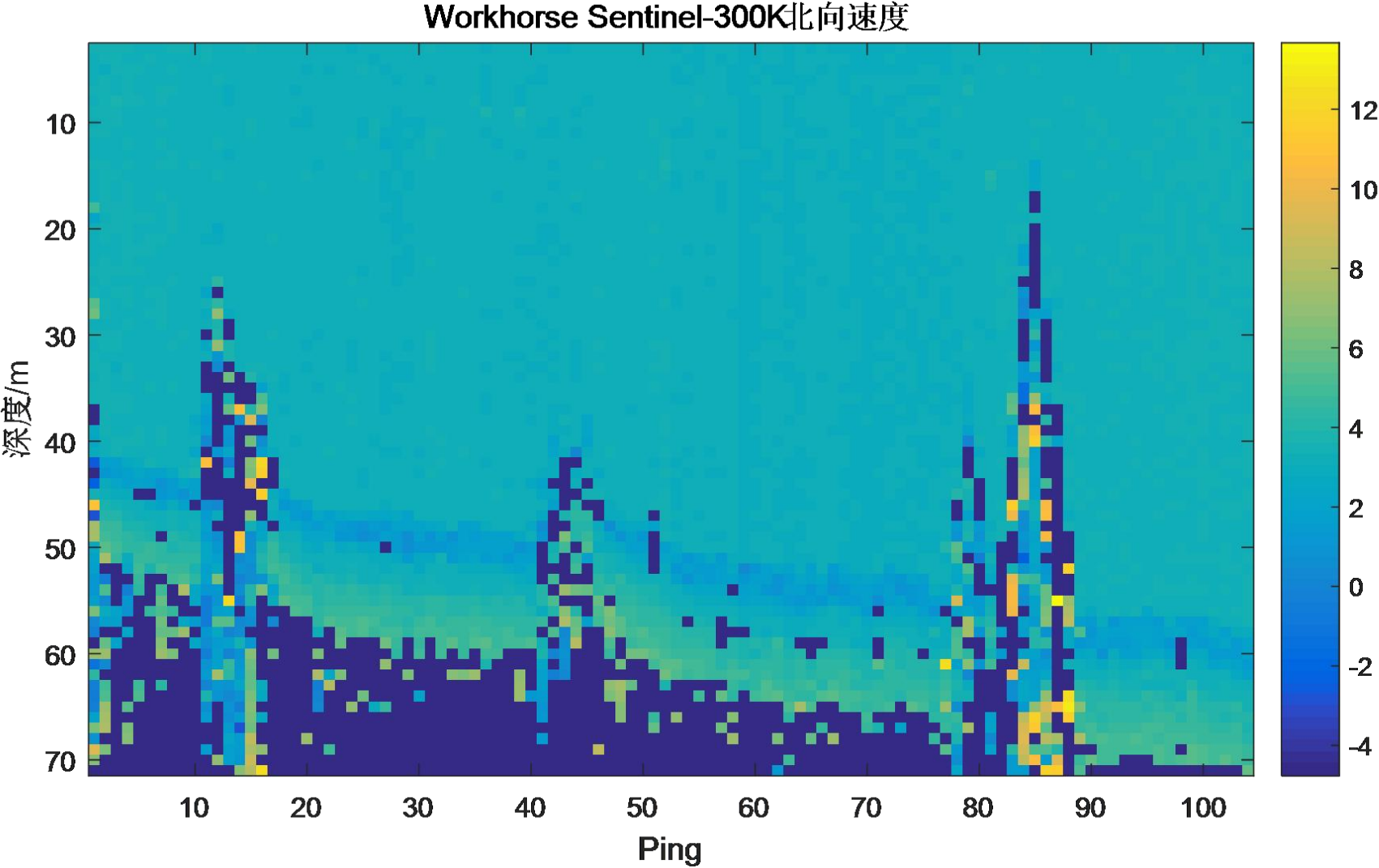

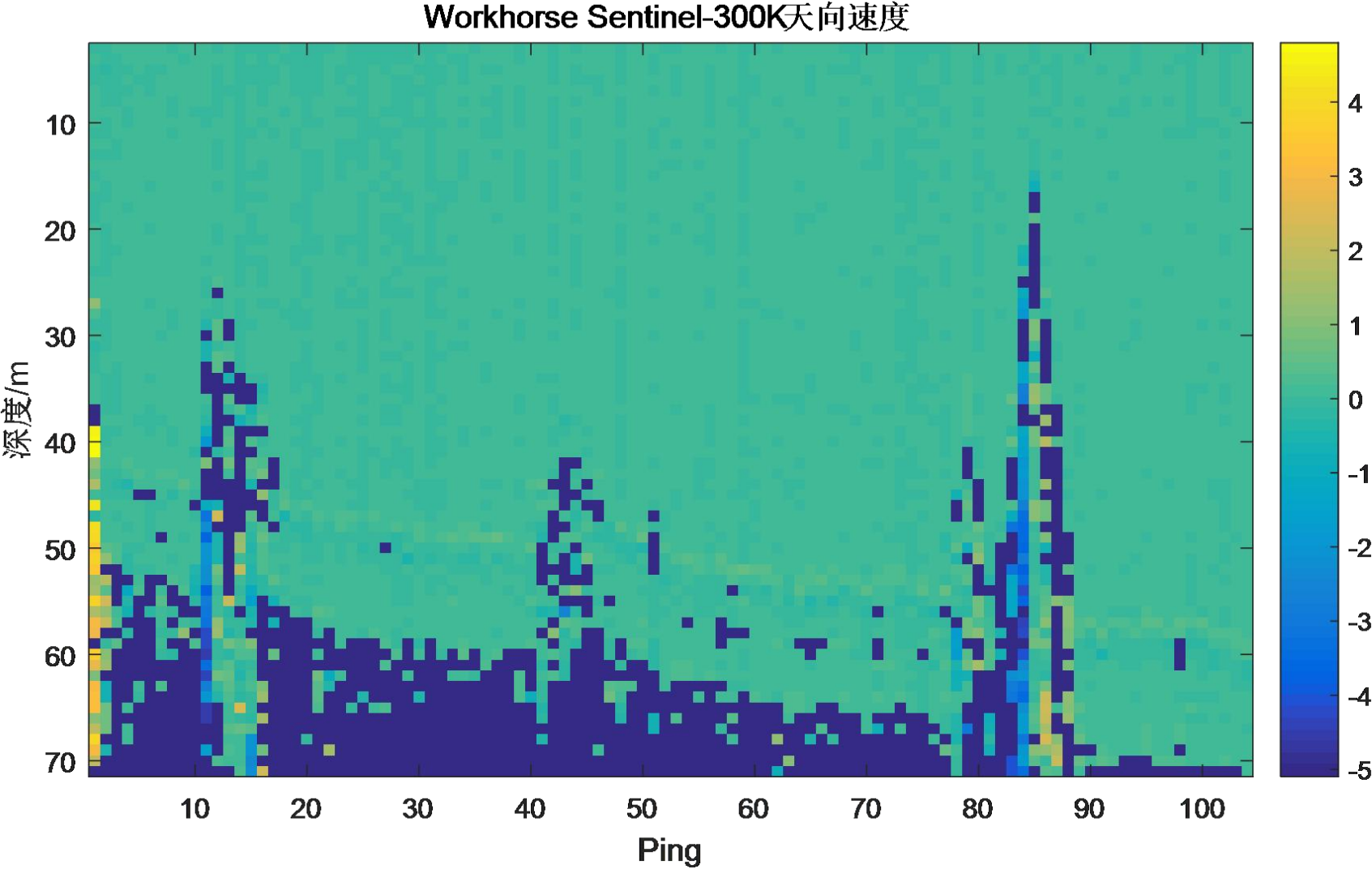
图 3.2.13 、Workhorse 走航测流结果图-层厚 1m
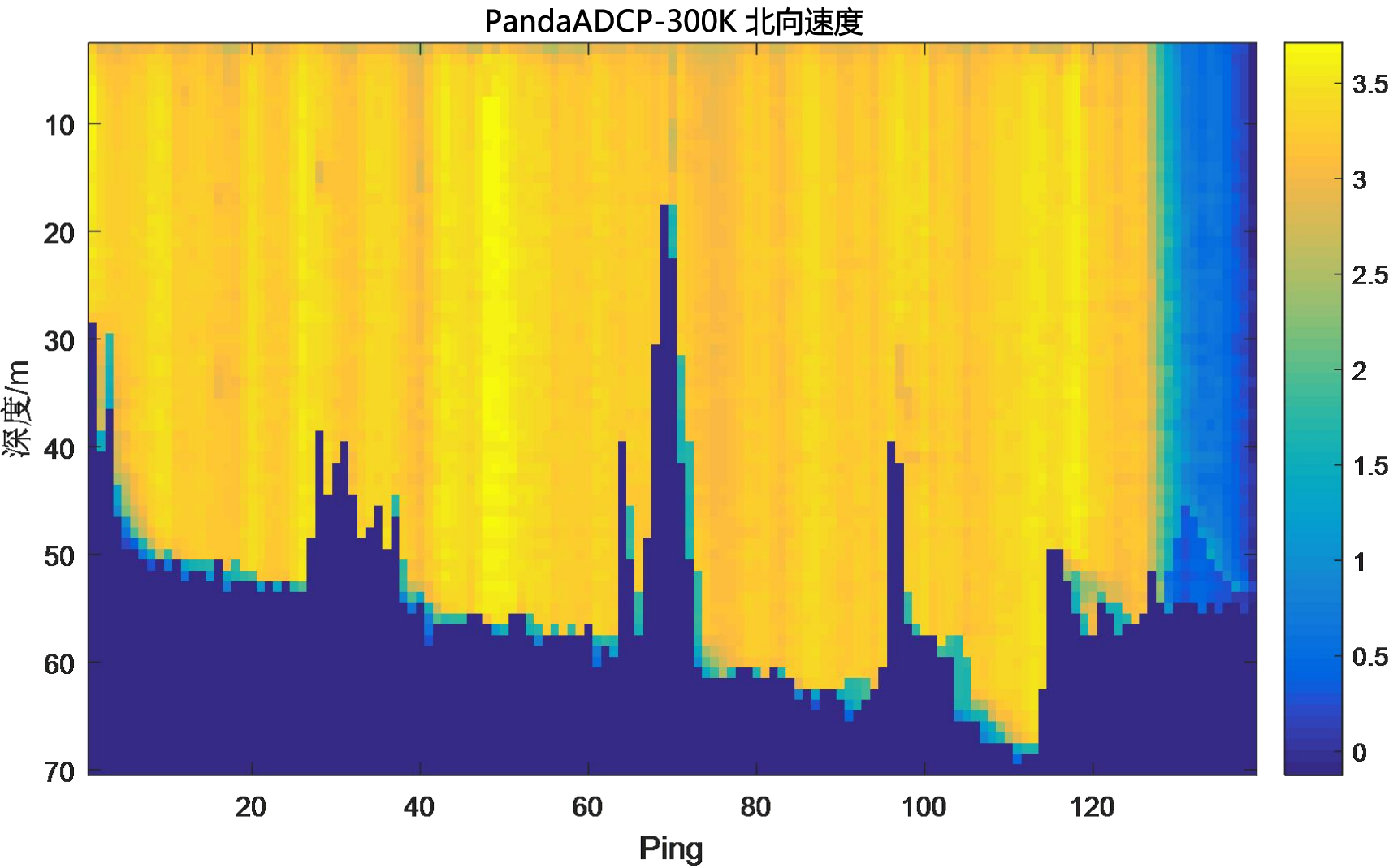
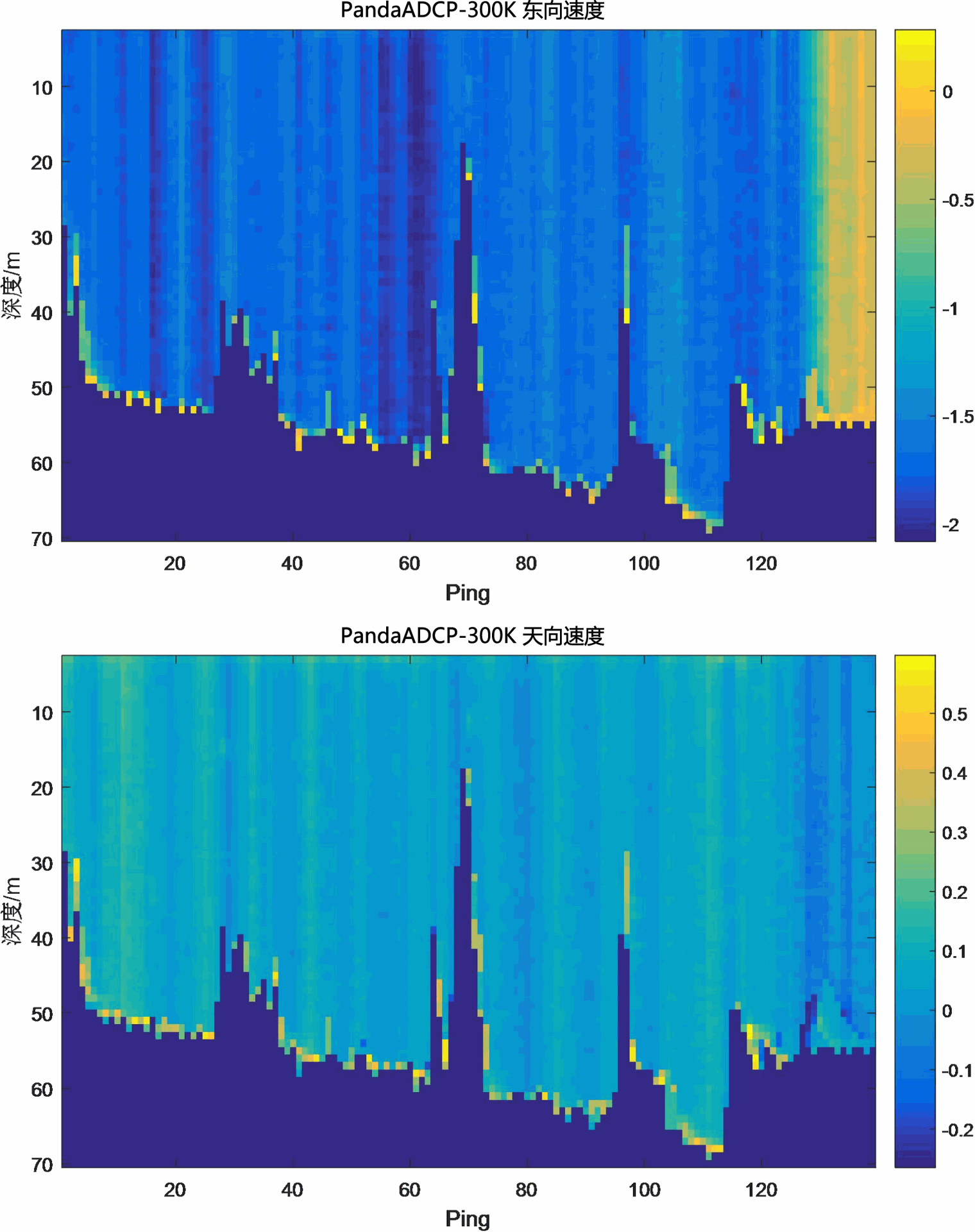
图 3.2. 14 、PandaADCP走航测流结果图-层厚 1m
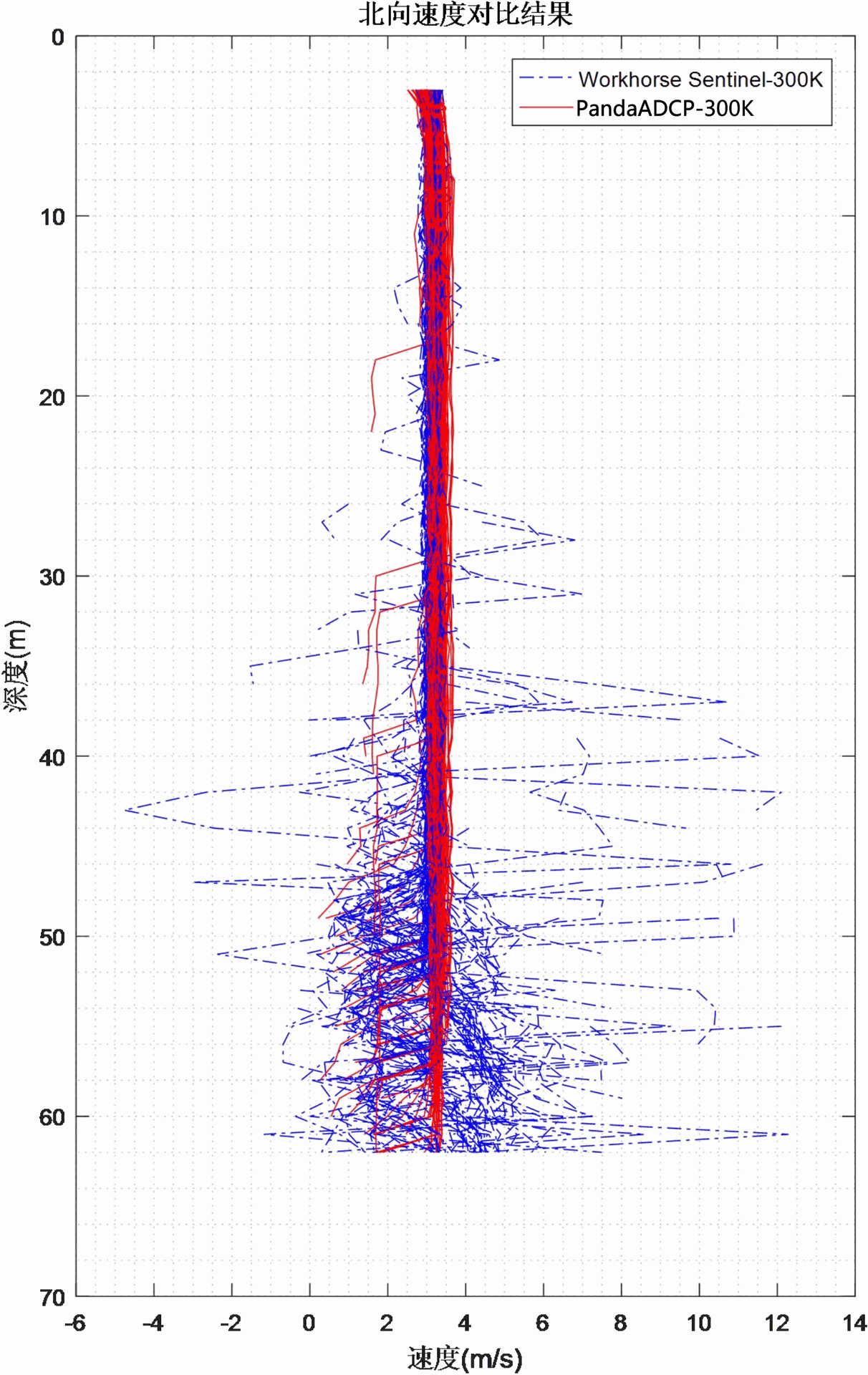

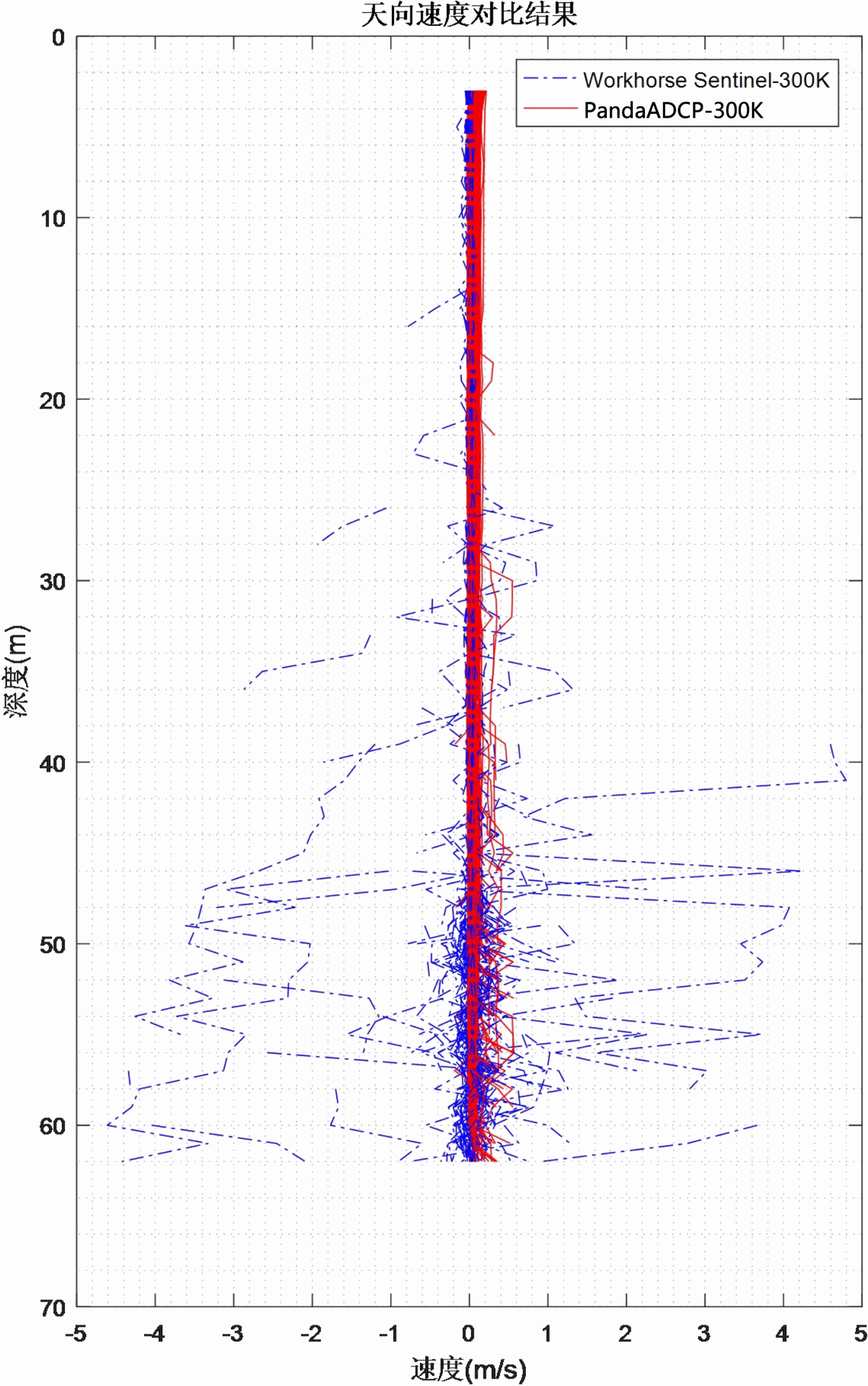
图 3.2.15 、三向速度多 Ping 测流结果图-层厚 1m
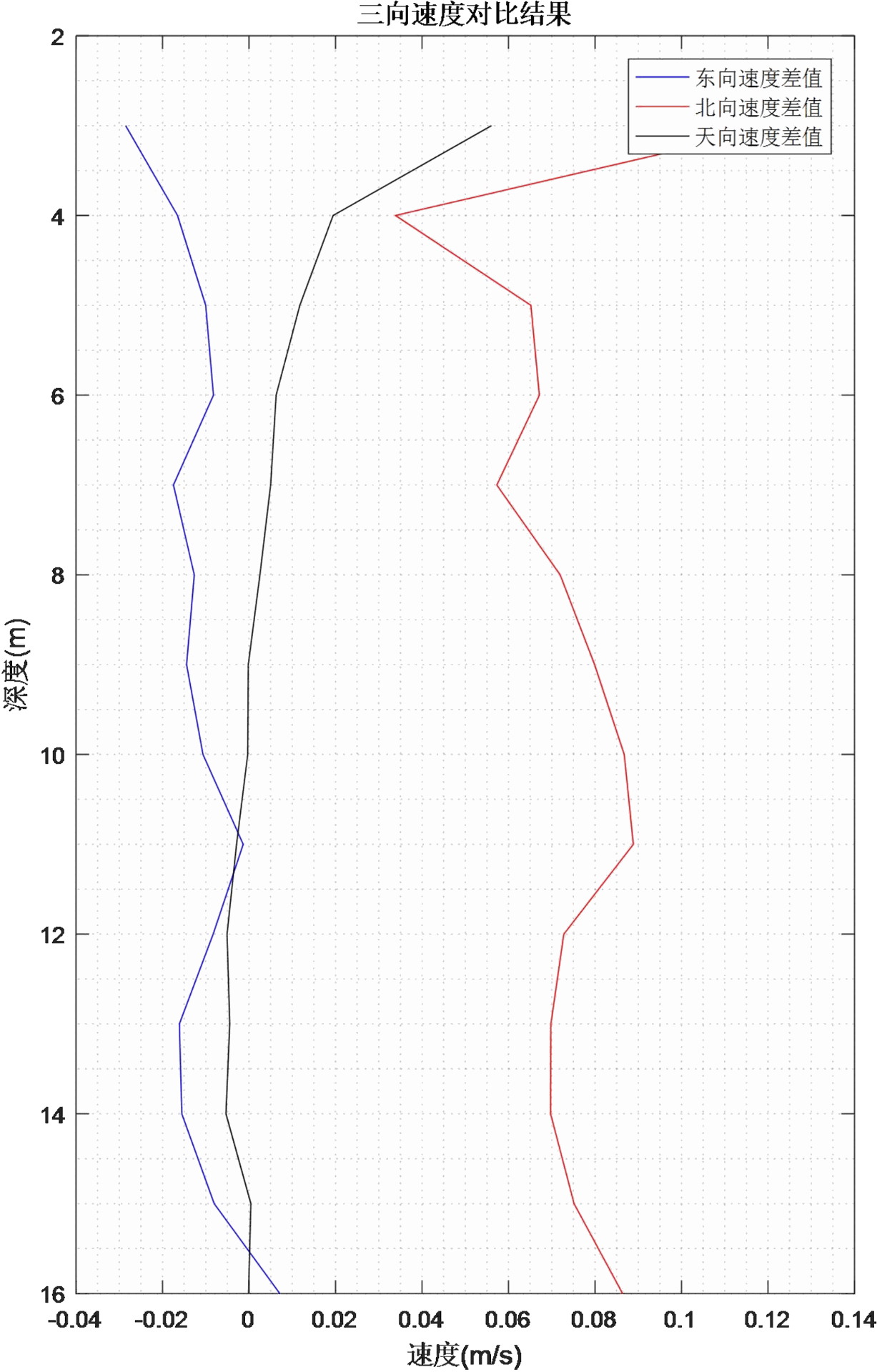
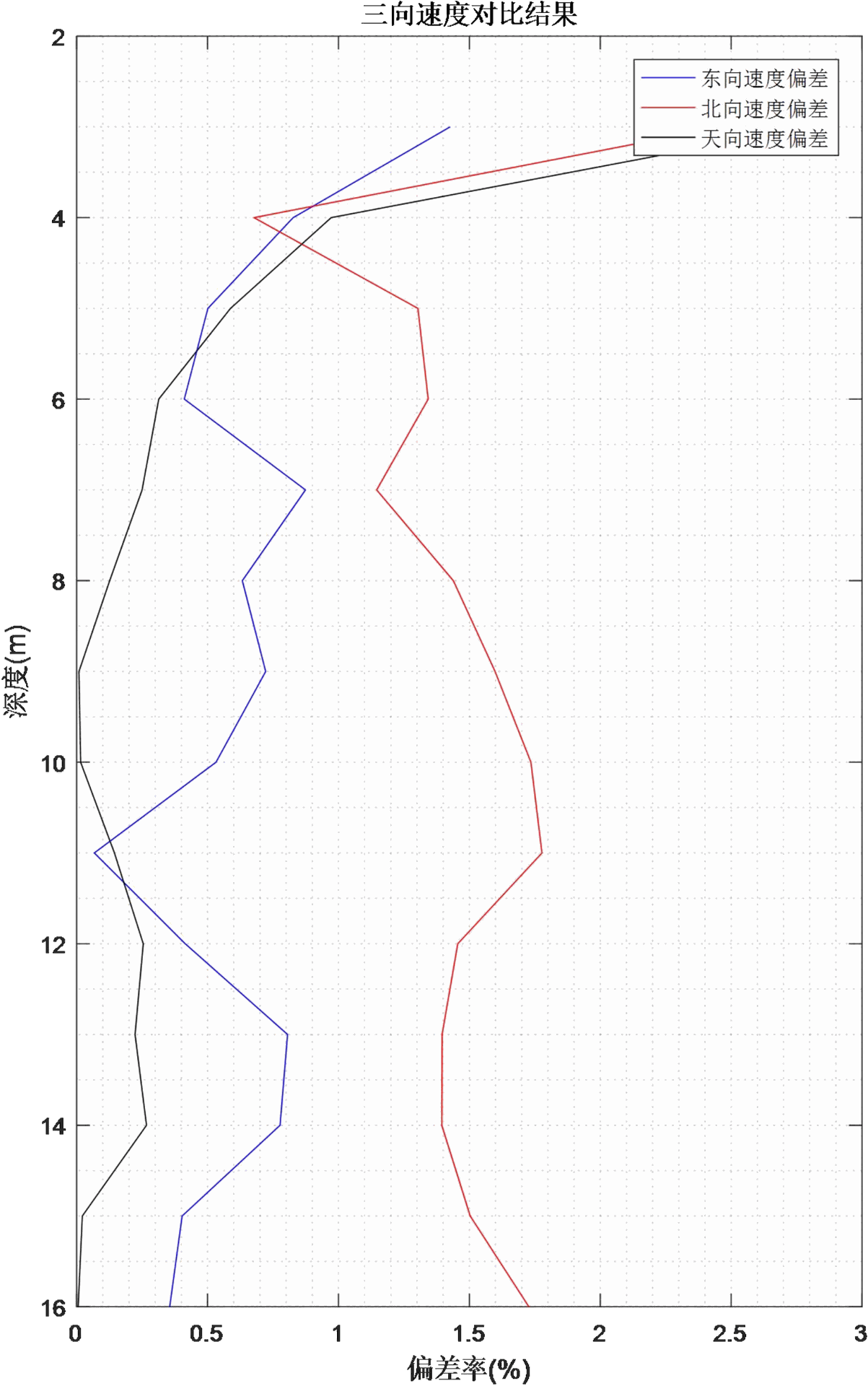
图 3.2.17 、三向速度偏率对比图
从测流比对结果可以看出,两台设备的动态测流范围基本一致,东向速度为 -2.5m/s~0.5m/s,北向速度为 2.5m/s~4.0m/s,天向速度为-0.05m/s~0.1m/s。且 PandaADCP 测流结果要比 Workhorse 更加稳定。
在走航测量模式下,1m 层厚的情况下,两台设备在大地坐标系下测量的水流 速度值的相对偏差小于2%。
(2)2m 层厚测流结果比对
从 GPS 记录的轨迹来看,2m 分辨率比测过程整体的运行轨迹从南往北运动。
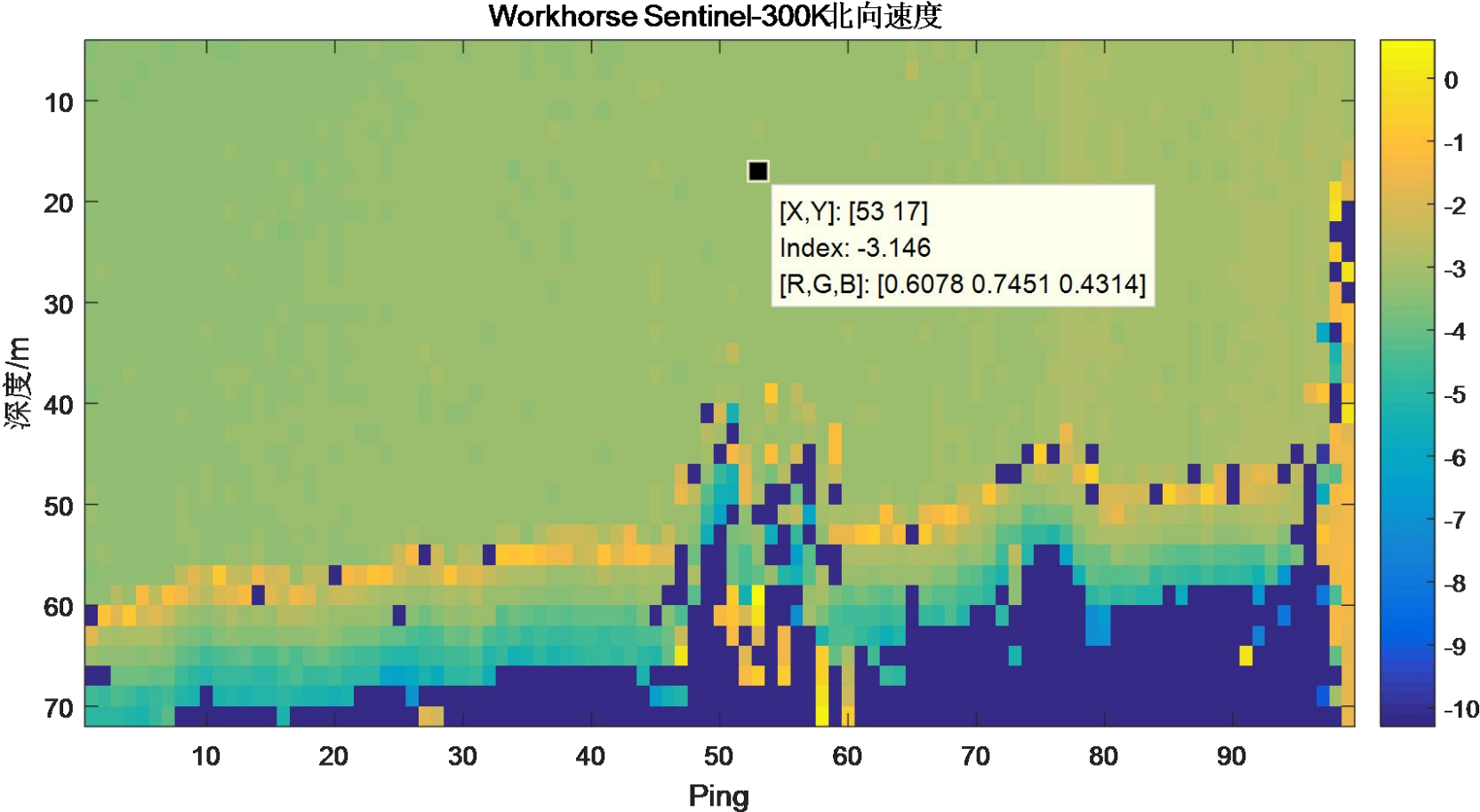
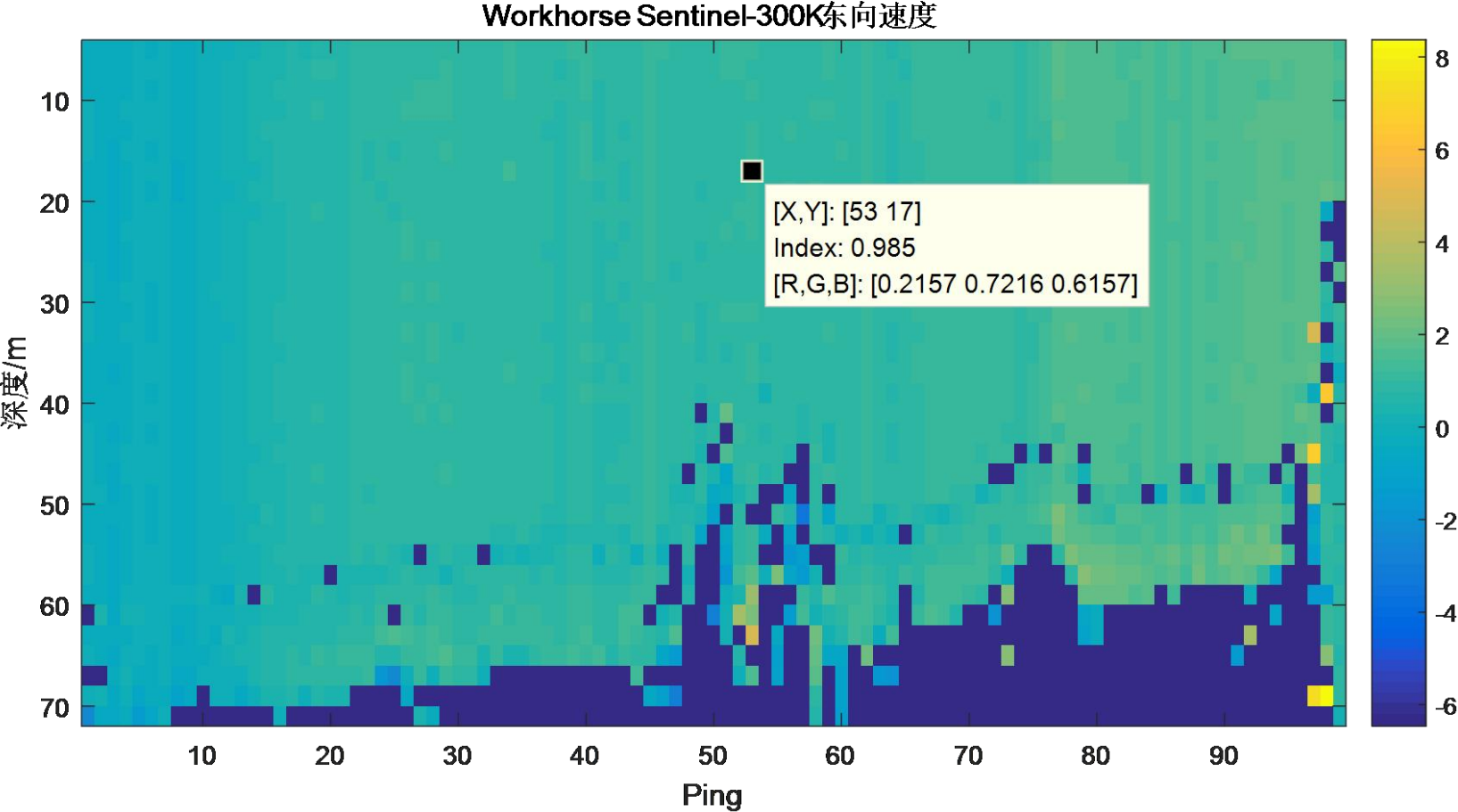
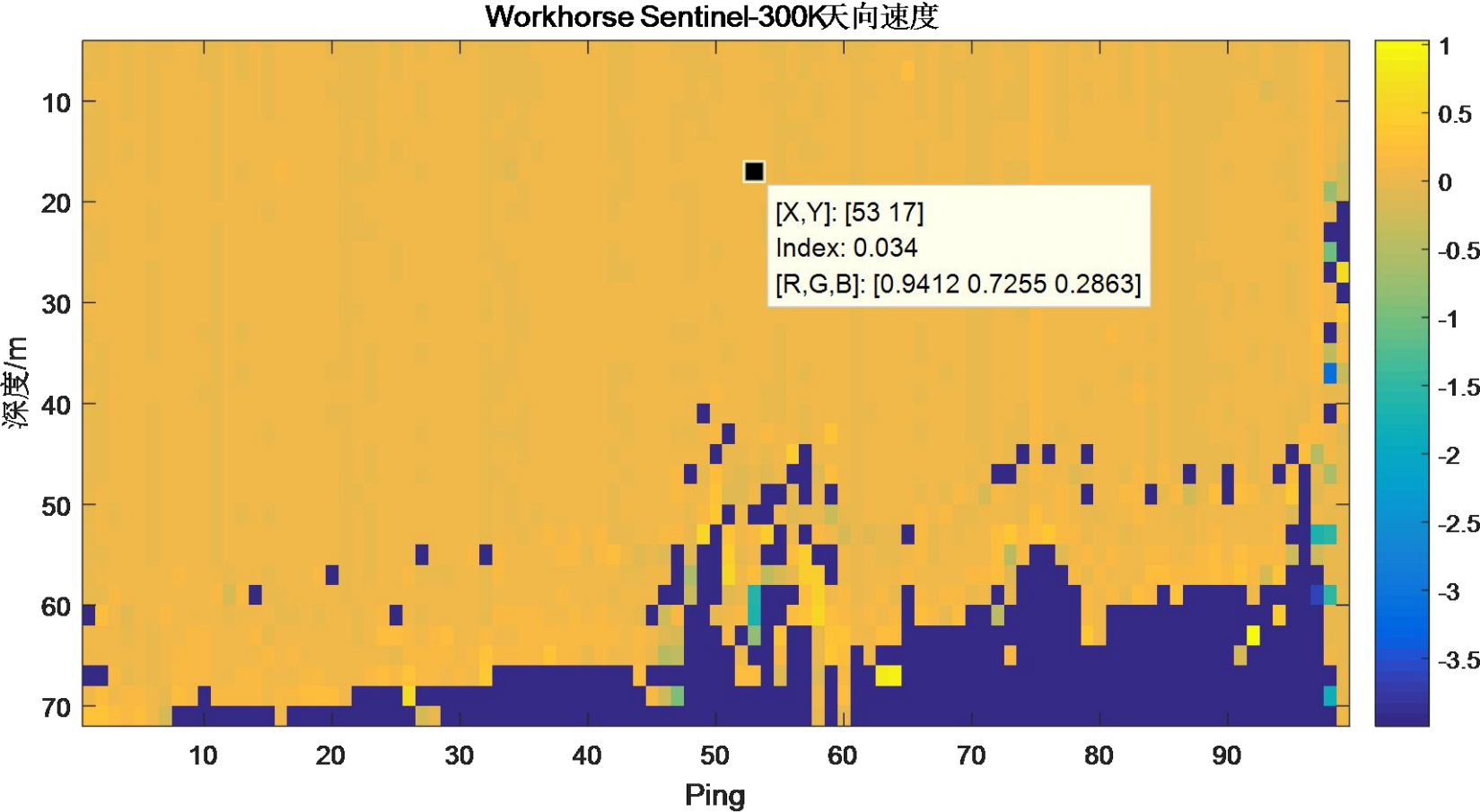
图 3.2.19 、Workhorse 走航测流结果图-层厚 2m
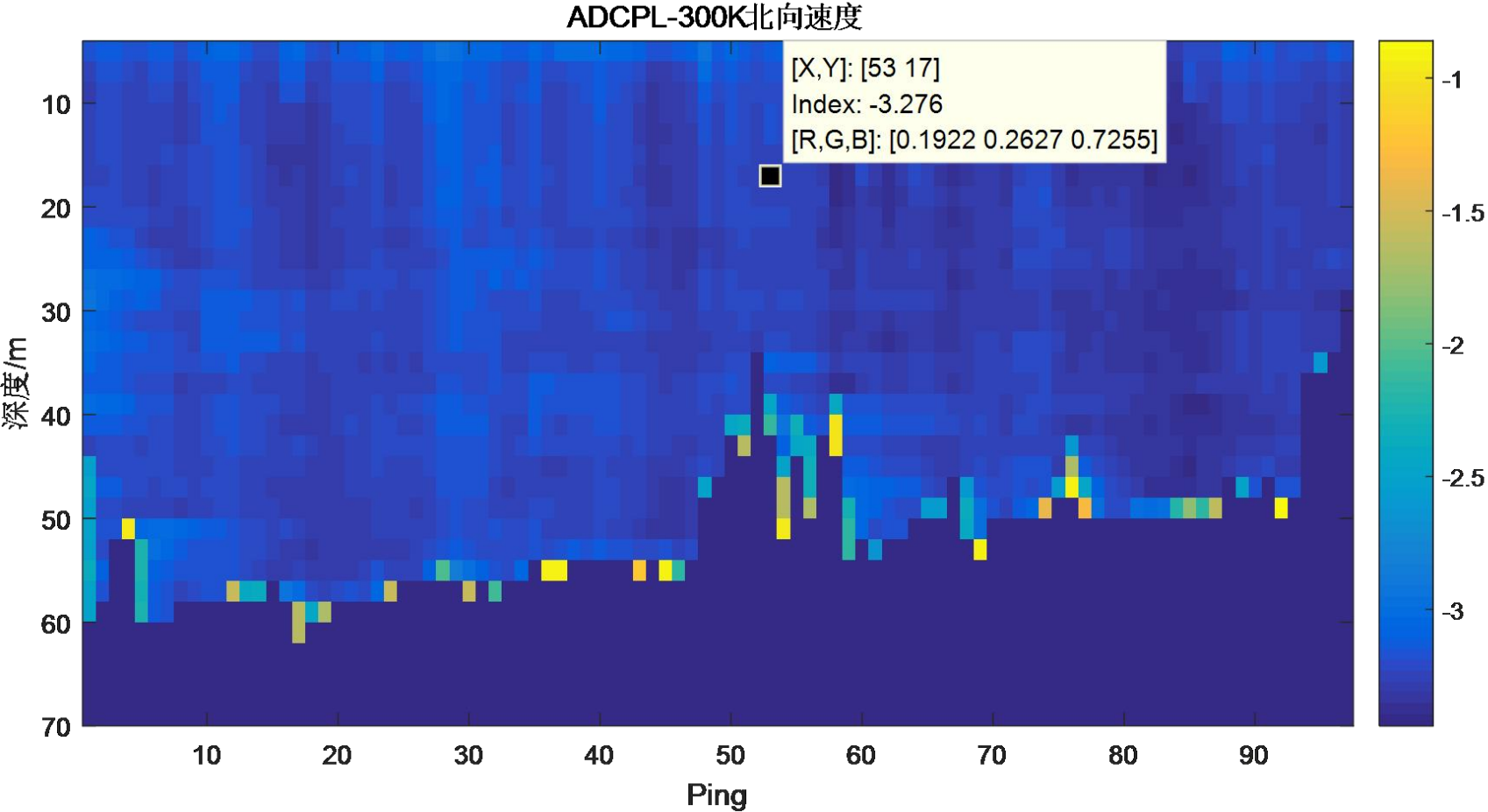

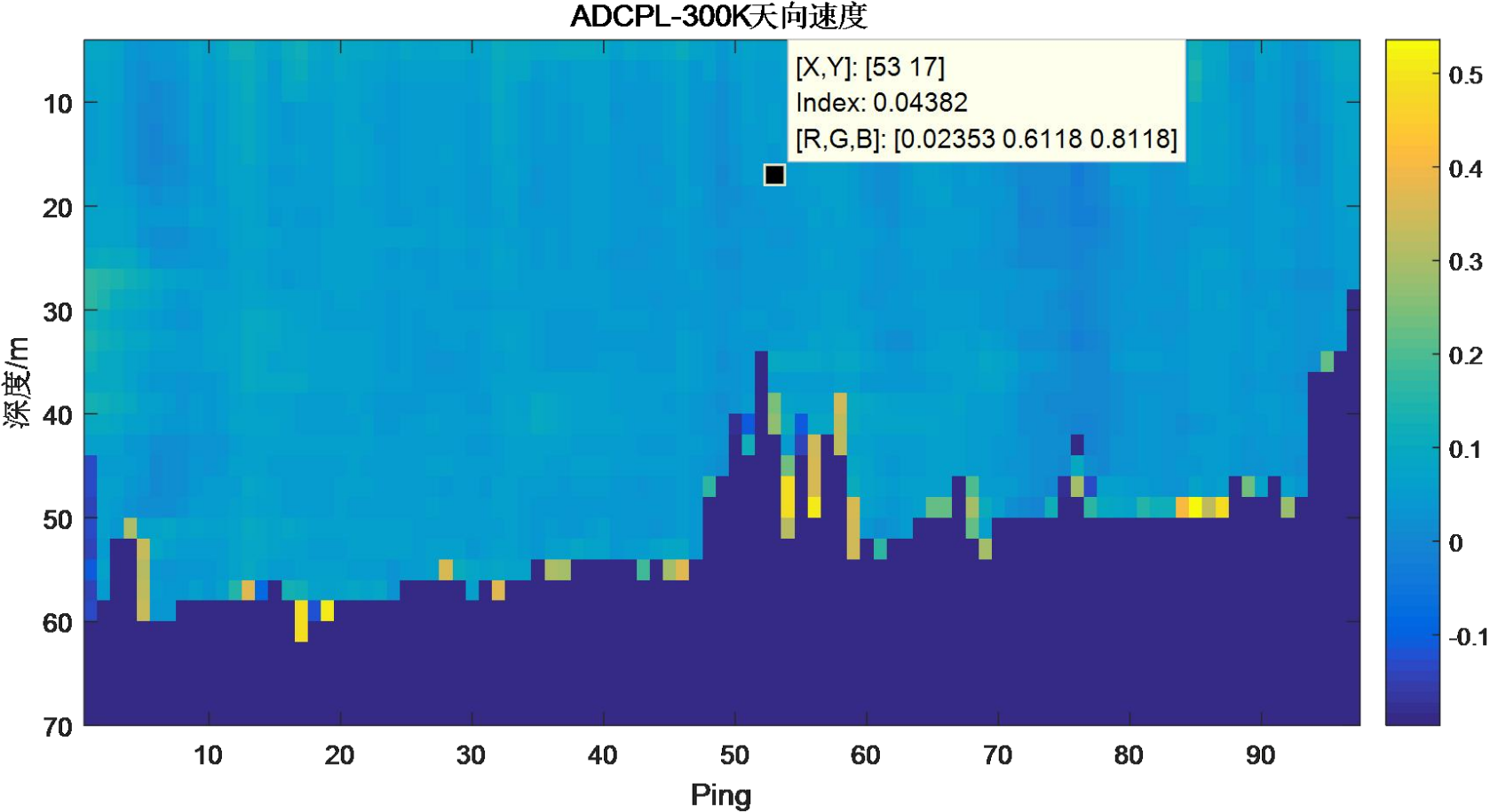
图 3.2.20 、PandaADCP 走航测流结果图-层厚 2m
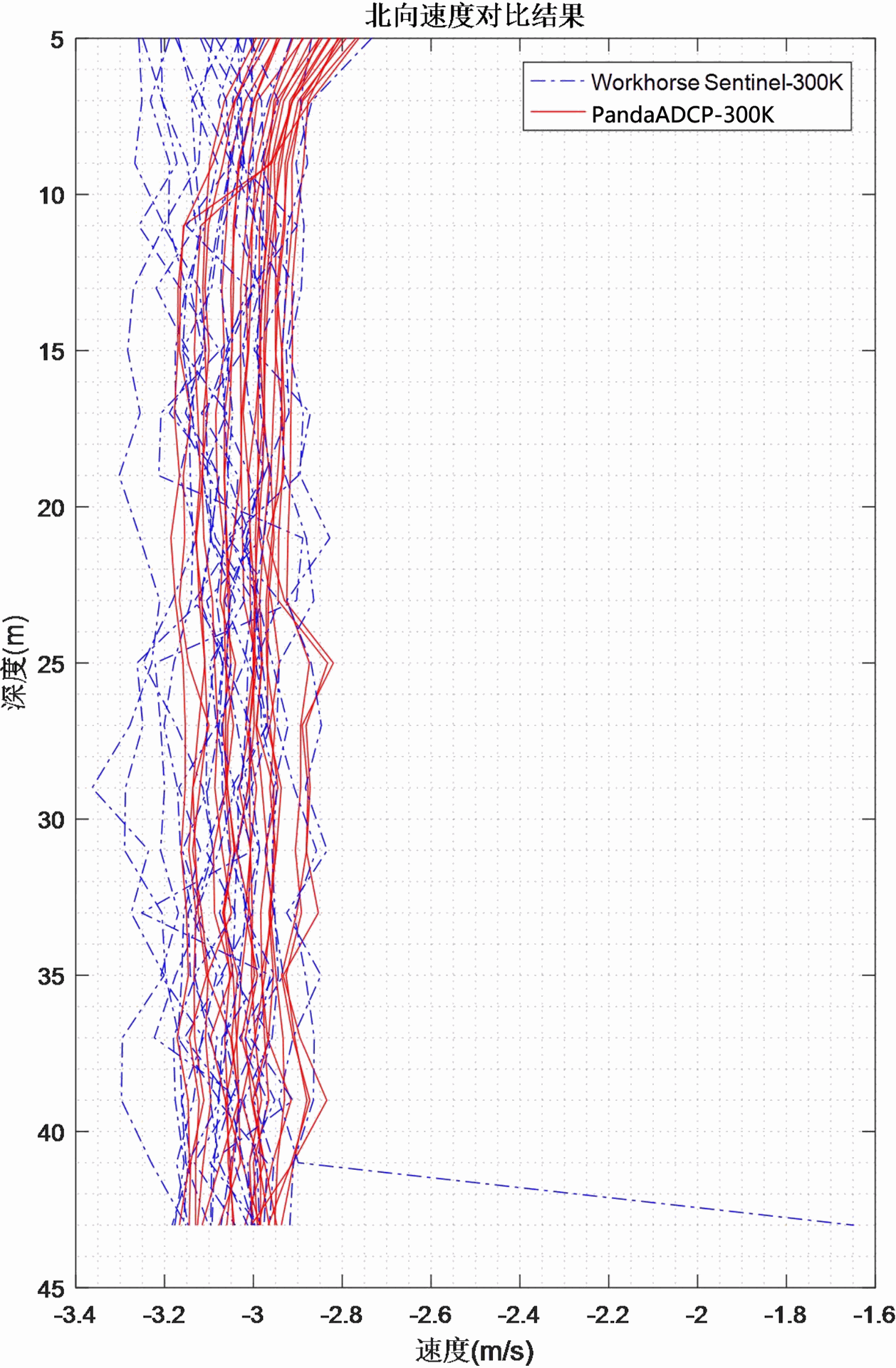
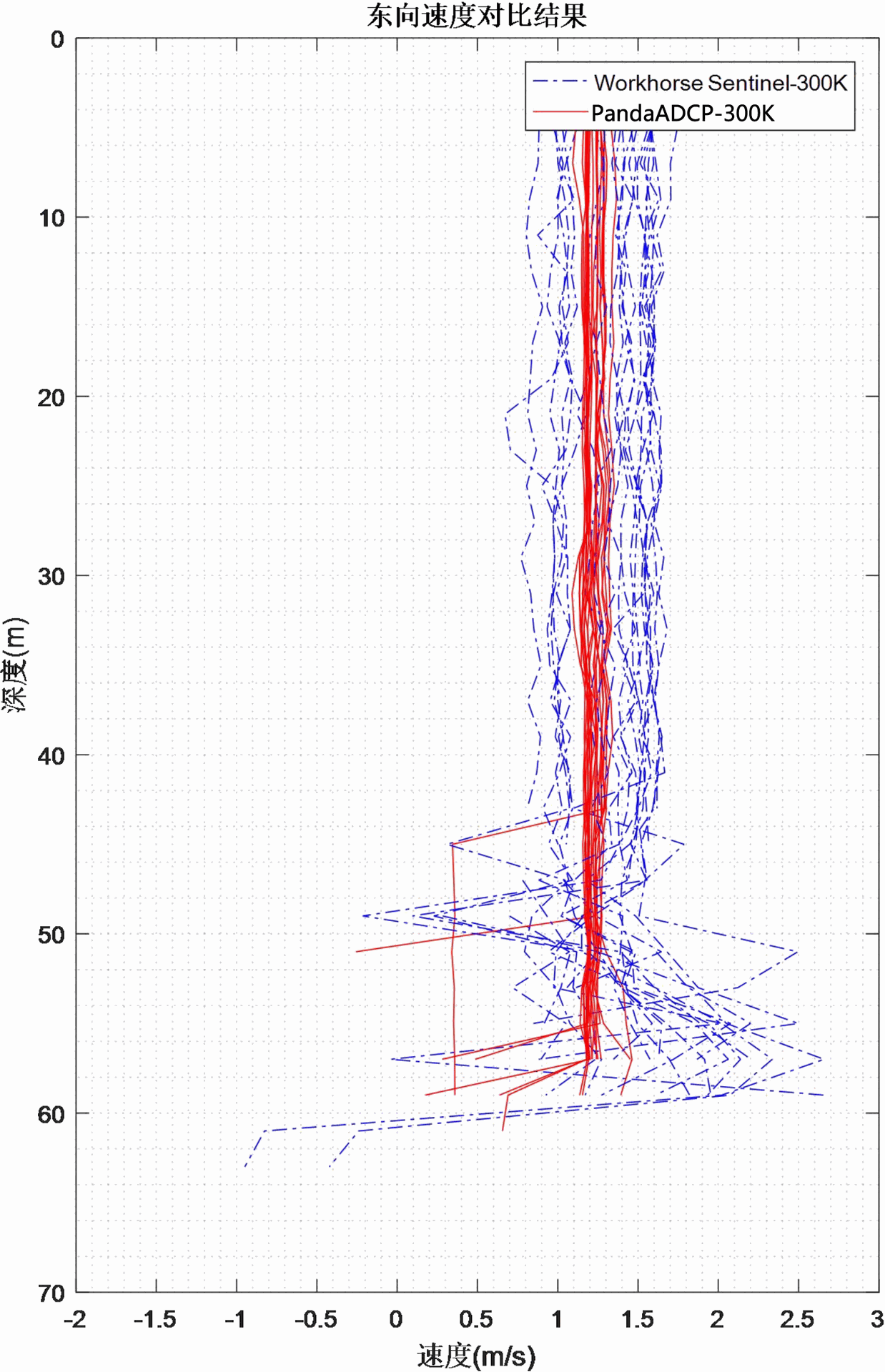
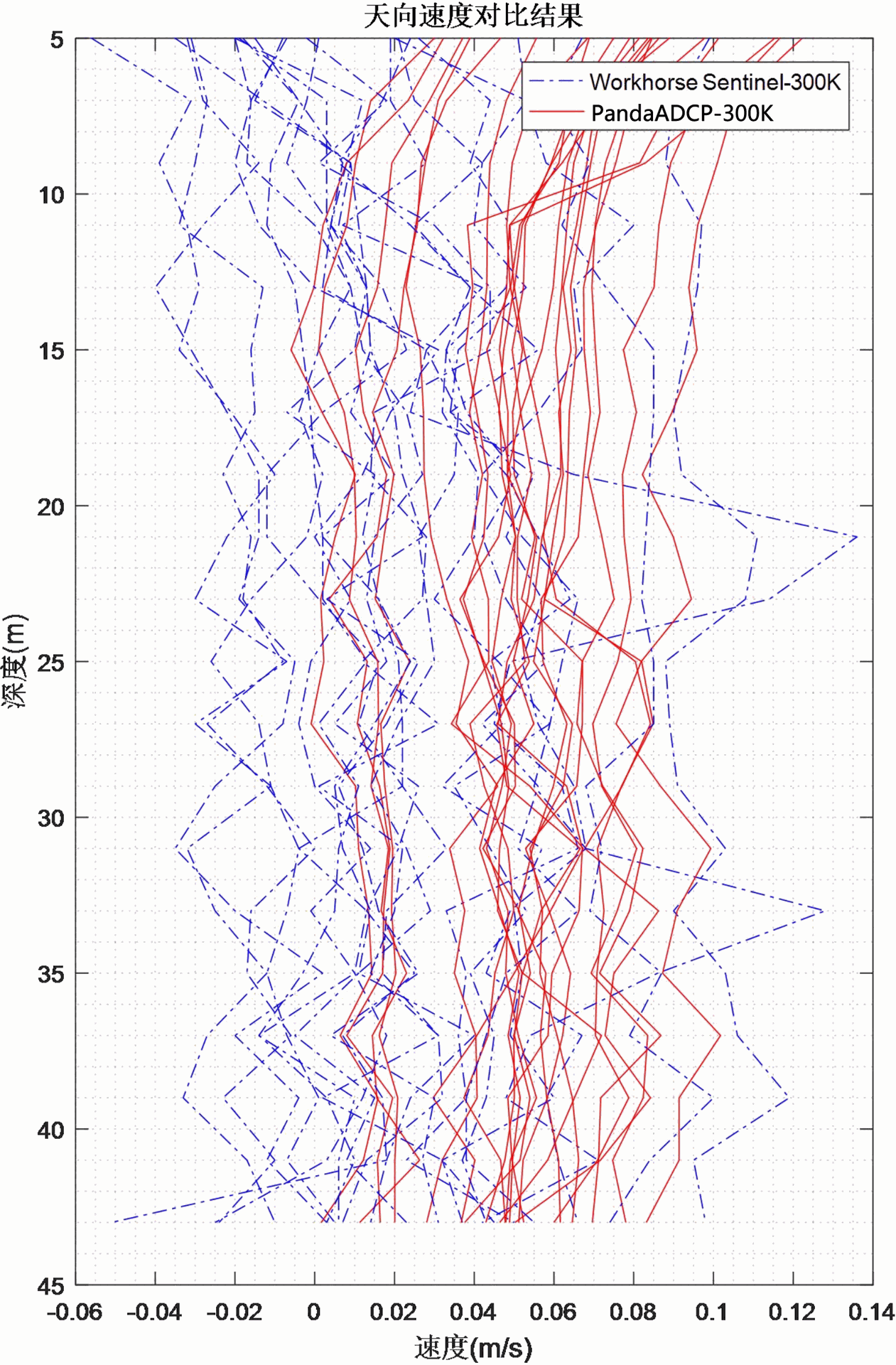
图 3.2.21 、三向速度多 Ping 测流结果图-层厚 2m

图 3.2.22 、三向速度相对偏差对比图

图 3.2.23 、三向速度偏率对比图
从测流比对结果可以看出,两台设备的动态测流范围基本一致,东向速度为
0.5m/s~2.0m/s,北向速度为-3.4m/s~-2.8m/s,天向速度为-0.06m/s~0.1m/s。
在走航测量模式下,2m 层厚的情况下,两台设备在大地坐标系下测量的水流 速度值的相对偏差小于2%。
综合走航测流数据分析比对结果,可认定在走航模式下,PandaADCP 性能与 Workhorse 性能基本一致,满足国产化替代的要求。
4. 试验结论
本次比测试验,采用我司研发生产的 PandaADCP-300K 和美国 TRDI 公司的 Workhorse Sentinel ADCP-300K 两型设备,分别 在坐底静态模式和走航模式下对测流性能进行综合比对。
为精确比对两者测量性能,利用Matlab 对两型设备存储的 PD0 结果数据进 行解析比较,比较结果表明无论是在静态模式和走航模式下,两者测量的水流速 度值的相对偏差小于2%,可认定两者测流性能一致,我司的 PandaADCP 可以替代TRDI 的高精度 ADCP 使用,后续采用PandaADCP 测量的流速剖面数据真实可信。
由此开始...
PandaADCP-300K VS TRDI WHS ADCP-300K比测实验