从百年拖曳线列阵到极细时代 水下“听海者”的进化史
在广袤海洋之下,有一种设备,它不主动发声,却能“听见”整片海域的动静。它不固定在舰体上,也不沉在海底,而是被拖曳在平台尾部,在远离自噪声的位置进行被动监听。
它就是拖曳线列阵(Towed Line Array),水下被动探测体系中最核心的湿端装备之一。
从1917年第一条拖曳式水听器阵列,到今天面向无人平台的极细拖曳线列阵,这项技术已经走过百年演进历程。它的发展史,本质上是一部不断在声学性能、结构工程与平台适配之间寻找平衡的进化史。
一、拖曳线列阵的发展演进
拖曳线列阵的发展,可以清晰地分为几个阶段,每一个阶段都与海洋装备的发展需求紧密相关。
1. 概念验证期(1917至二战)
这一阶段的核心目标,是解决舰艇自噪声对监听效果的影响。工程师将水听器排成线性结构并拖曳至船尾,从而远离噪声源,提高信噪比。
主要特点包括:
① 阵列规模较小
② 结构简单
③ 解决左右舷模糊问题
④ 实现基础被动监听能力
这是拖曳线列阵从“概念”走向“可用”的第一步。
2. 工程化应用期(1950s-1970s)
随着潜艇静音技术迅速提升,水下目标变得更难探测,拖曳线列阵进入工程化快速发展阶段。
这一时期的技术特征为:
① 阵列长度显著增加
② 阵元数量大幅提升
③ 收放系统成熟
④ 干端信号处理系统建立
拖曳线列阵成为远距离被动探测的核心装备。
3. 低频大孔径时代(1980s—1990s)
当目标噪声进一步降低,工程师开始转向低频、大孔径设计,以提高远距离探测能力。
核心策略包括:
① 降低工作频率
② 延长阵列长度
③ 提升孔径增益
典型阵列长度可达数百米以上,阵元数量达到数百个。然而,大尺寸结构带来了重量大、存储困难、机动性受限等问题。
4. 细线阵时代(1990s—2000s)
为解决“大而重”的工程矛盾,细线拖曳线列阵逐渐出现,阵列直径降低至40毫米以下。
细线阵的优势在于:
① 重量降低
② 拖曳阻力减小
③ 平台适装性增强
④ 存储与收放更加便利
这一阶段标志着拖曳线列阵从“粗壮型装备”向“轻量化装备”转型。
5. 极细拖曳线列阵时代
随着AUV、UUV、无人水面艇等平台兴起,传统细线阵仍显偏大。于是——极细拖曳线列阵(直径 <20mm)出现。
它是为无人平台而生的阵列。
二、什么是极细拖曳线列阵?
简单来说就是直径小于20毫米的拖曳线列阵。
它的出现,是为了适应:
无人化
轻量化
小型化
低阻力
相比传统阵列,它具备:
更小体积
更低拖曳阻力
更高适装性
更低对平台干扰
可以轻松搭载于:
AUV
UUV
小型水面无人艇

三、极细拖曳线列阵的关键技术挑战
阵列直径的减小,并不是简单缩放,而是带来了新的工程难题。
1. 流噪声问题
拖曳线列阵在水中运动时,水流掠过护套表面形成湍流边界层,湍流压力脉动通过护套传递至水听器,产生流噪声。
对于极细阵而言:
① 水听器更接近护套表面
② 护套厚度减小
③ 结构刚度降低
即便在低拖速下,流噪声也可能成为主导噪声源。
工程上通常结合:
湍流理论模型
护套传递函数分析
流固耦合仿真
实海拖曳试验
对流噪声进行系统评估。
2. 阵型畸变问题
拖曳线列阵属于柔性结构,在拖速变化、海况扰动与水流影响下,会产生弯曲与振动。
阵型畸变可能导致:
① 波束主瓣偏移
② 指向性失真
③ 定位精度下降
④ 探测性能退化
极细阵柔性更强,因此需要结合姿态传感器与阵形补偿算法进行实时修正。
四、技术演进的三条主线
纵观百年发展,拖曳线列阵始终围绕三条主线演进:
① 声学能力主线
粗线阵 → 大孔径 → 低频探测 → 多线阵体阵
目标始终是:提高远距离低频目标探测能力。
② 结构演进主线
粗线阵→ 细线阵→ 光纤阵→ 极细阵→ 多线阵体阵
阵列直径不断减小,阵长不断增加。
③ 工程挑战主线
阵列越细:
流噪声越严重
姿态越难控制
信号处理越复杂
当前核心突破点:
流噪声抑制
阵型畸变补偿
高灵敏水听器小型化
光纤复用与扩展技术
自适应波束形成
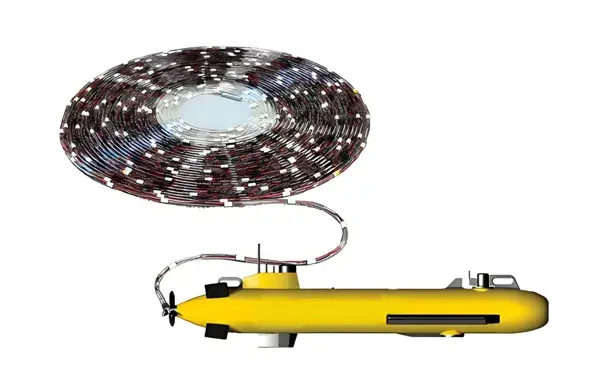
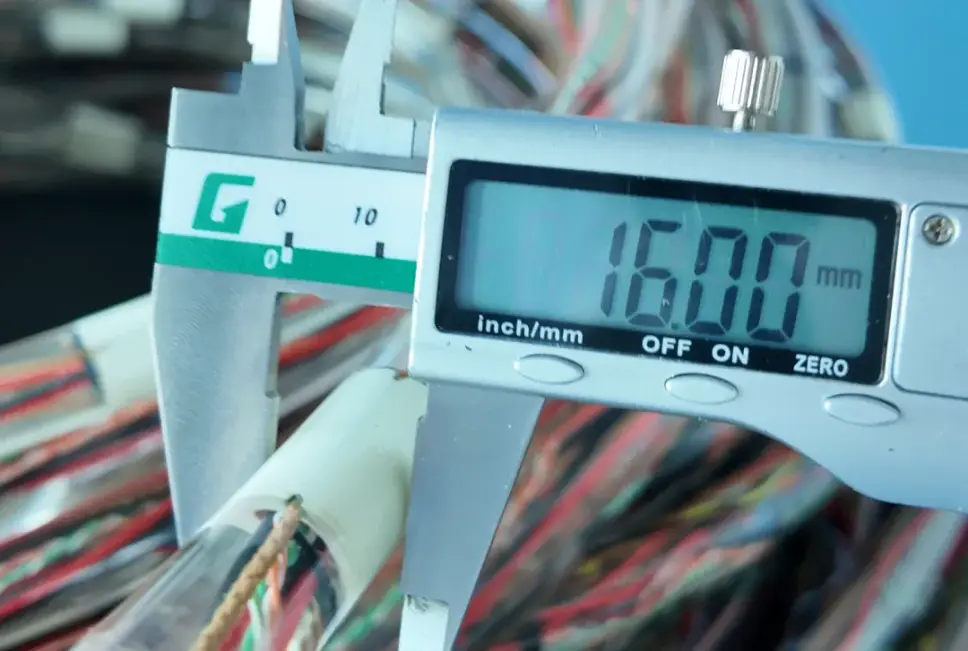
五、偶信极细拖曳线列阵系统
在极细阵技术不断成熟的背景下,偶信推出面向AUV平台的极细拖曳线列阵系统,采用直径仅Φ16mm的拖曳线列阵作为水下信号采集单元,结合高性能信号处理平台与智能识别算法,实现对海洋环境与水下目标的高精度探测与识别。
系统组成
系统主要包括:
① 控制与数据处理系统
② Φ16mm极细拖曳线列阵
③ 信号处理机
支持不同级别AUV平台:
阵列长度 | 阵元数 | 适配平台 |
24m | 16 / 32元 | 10–100kg级AUV |
48m | 32 / 64元 | 100–300kg级AUV |
101m | 64 / 128元 | 300kg以上AUV |
模块化设计保障灵活扩展与工程适配能力。
核心功能
目标探测与跟踪
多目标自动识别
特征提取与分类
运动信息融合分析
AIS数据融合
平台协同组网
系统可集成GPU/NPU模块,实现AI算法部署,提高目标识别准确度。在保证声学性能的同时,极细结构有效降低拖曳阻力,提升无人平台续航能力。
结语
从1917年的简易拖曳水听器,到今天的极细拖曳线列阵,拖曳线列阵的发展始终围绕一个核心目标——在复杂海洋环境中获得更清晰、更远距离的被动探测能力。
今天,随着无人平台与智能算法的融合,极细拖曳线列阵正在成为无人化水下探测体系的重要组成部分。它不发声,却持续倾听;它看不见,却描绘出水下态势图景。
拖曳线列阵仍在进化,而海洋,也仍在等待被更清晰地“听见”。
参考文献
[1]翁金辉.声纳接收阵技术发展综述[J].电子世界,2020,(24):78-80.
[2]赵诗尧.超细拖曳线列阵的流噪声与水下姿态特性研究[D].哈尔滨工程大学,2023.
[3]朱辉庆,张海生.拖曳线列阵若干关键技术综述[J].声学与电子工程,2020,(02):54-57.
[4]运朝青,胡正良,胡永明.细线拖曳声纳研究进展[J].半导体光电,2012.



