在海洋水文观测、航道测绘和科研调查中,声学多普勒流速剖面仪(ADCP)已成为不可或缺的“水下透视眼”。然而,许多用户在初次接触ADCP时会发现,它有两种截然不同的工作模式——自容式与直读式。它们有何区别?在实际项目中该如何选择?本文将深入解析这两种模式的特性与应用场景,助你精准匹配最适合的作业方案。

一、两种模式,两种逻辑:理解ADCP的“双面人生”
自容式和直读式是在不同配置与部署逻辑下的两种工作形态。它们的核心区别体现在供电方式、数据获取逻辑与适用场景三大维度。
1、自容式:海洋中的“长期潜伏者”
自容式ADCP依赖内置电池供电,像一个独立的水下观测站。它在部署后自主工作,数据存储于设备内部,待任务结束后回收设备才能读取。这种模式适用于长期、连续、无人值守的观测任务,例如对某片海域进行数月甚至数年的流速剖面监测。
2、直读式:实时扫描的“移动侦察兵”
直读式ADCP通常不依赖内置电池,而是通过电缆由船载电源供电。设备与甲板单元实时连接,数据在测量瞬间即可传输至电脑,实现“边测边看”。它主要搭载于船只,适用于需要即时获取结果、灵活调整测线的移动测绘任务。
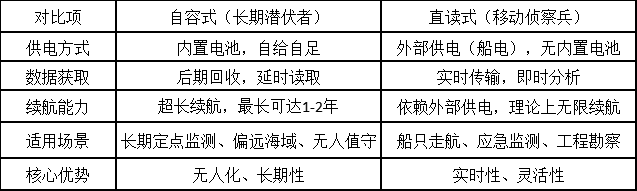
二、五大维度深度对比:一张表格看清差异
三、场景化选择指南:你的项目更适合哪种模式?
选择自容式,当你的项目目标是:
捕捉长期水文变化规律
例如,在某一海峡部署自容式ADCP,持续收集一整年的流速、流向数据,用于研究季节性的环流变化或潮汐规律,为海洋气候研究提供关键数据集。
在偏远或危险海域工作
在极地、深远海或气象条件恶劣的海域,无法频繁派遣船只。布放自容式ADCP后,可让其默默工作数月,待适当时机回收,极大降低了人力和船时成本。
进行隐蔽或低干扰监测
在生态敏感区或渔业资源调查中,长期固定的自容式设备对环境的干扰远小于频繁来往的船只,能够获取更接近自然状态下的水文信息。

选择直读式,当你的项目需求是:
需要快速决策与反馈
例如,在进行疏浚工程时,需要实时掌握抛泥点附近的流速流向,判断悬浮物扩散方向,以便及时调整作业方案。走航式的实时数据是实现精准施工管理的基石。
进行大范围区域普查
要对一个海湾或一段河口进行流速断面普查,利用船只搭载走航式ADCP来回穿梭测量,能在短时间内快速绘制出大范围的流场分布图。
执行应急监测任务
如发生溢油事故,需要立刻了解事故海域的当前海流情况以预测油污扩散路径。走航式ADCP可以迅速部署,随船提供实时数据,为决策争分夺秒。

四、进阶思考:能否“鱼与熊掌”兼得?
现代海洋观测项目正变得越来越复杂,有时单一模式难以满足所有需求。幸运的是,技术的灵活性正在模糊二者的界限。例如,部分ADCP支持混合工作模式:在船只走航测量结束后,可将设备卸下并固定在海底,切换为自容模式继续进行定点长期监测。这种“一机两用”的策略,极大地提升了设备利用率和观测数据的多维性。
五、总结
没有最好的模式,只有最合适的方案。在偶信科技的技术图谱中,自容式的持久沉稳与直读式的敏捷精准相辅相成。一个擅长静默洞察,记录深海的规律;一个精于动态捕捉,把脉水流的瞬息。二者共同赋予了ADCP系统全面感知水下世界脉搏的强大能力。理解它们的本质差异,结合项目的核心目标、预算周期与数据时效要求,你就能做出最明智的选择,让这台“水下透视眼”为你揭示海洋流动的全部奥秘。



