在多普勒计程仪(DVL)技术快速发展的今天,国产设备能否与进口产品一较高下?近日,偶信科技(OCEAN)在千岛湖成功完成了DVL-600K的实地测试,用数据给出了有力答案。作为海洋仪器领域的领先者,偶信科技(OCEAN)自主研发生产的DVL-600系列多普勒计程仪性能已经可以媲美TRDI同系列产品,可实现国产化替代,为验证本公司DVL-600系列产品的性能,特开展湖上试验。通过与高精度GPS航迹相比较,验证本产品的高性能。同时通过分析研究湖上试验数据,为进一步提高设备的测速和计算航程性能提供数据支撑。
一、试验背景
多普勒计程仪(DVL)是一种利用水下声波的多普勒效应进行测速和计算航程的仪器,随着科学技术的发展和海洋开发的重视,多普勒计程仪的应用日益广泛,更高性能、更小型化的多普勒计程仪的研发受到各国的高度重视。
千岛湖以其独特的水文条件——水深变化大、底部地形复杂、水质清澈且流动性稳定——成为测试DVL性能的理想场所。偶信科技(OCEAN)技术团队选择在此进行DVL-600K的全面评估,重点关注设备在实际水体中的测速精度、底部跟踪稳定性以及不同深度下的工作表现。
杭州淳安县千岛湖镇中心码头:

二、试验设备
2 台 DVL-600K 设备;
1 套 GPS;
2 套 锂电池;
三、试验平台
千岛湖某型游船

四、试验内容
本次试验主要验证 DVL-600K 设备的底跟踪、测速和航程计算的性能。
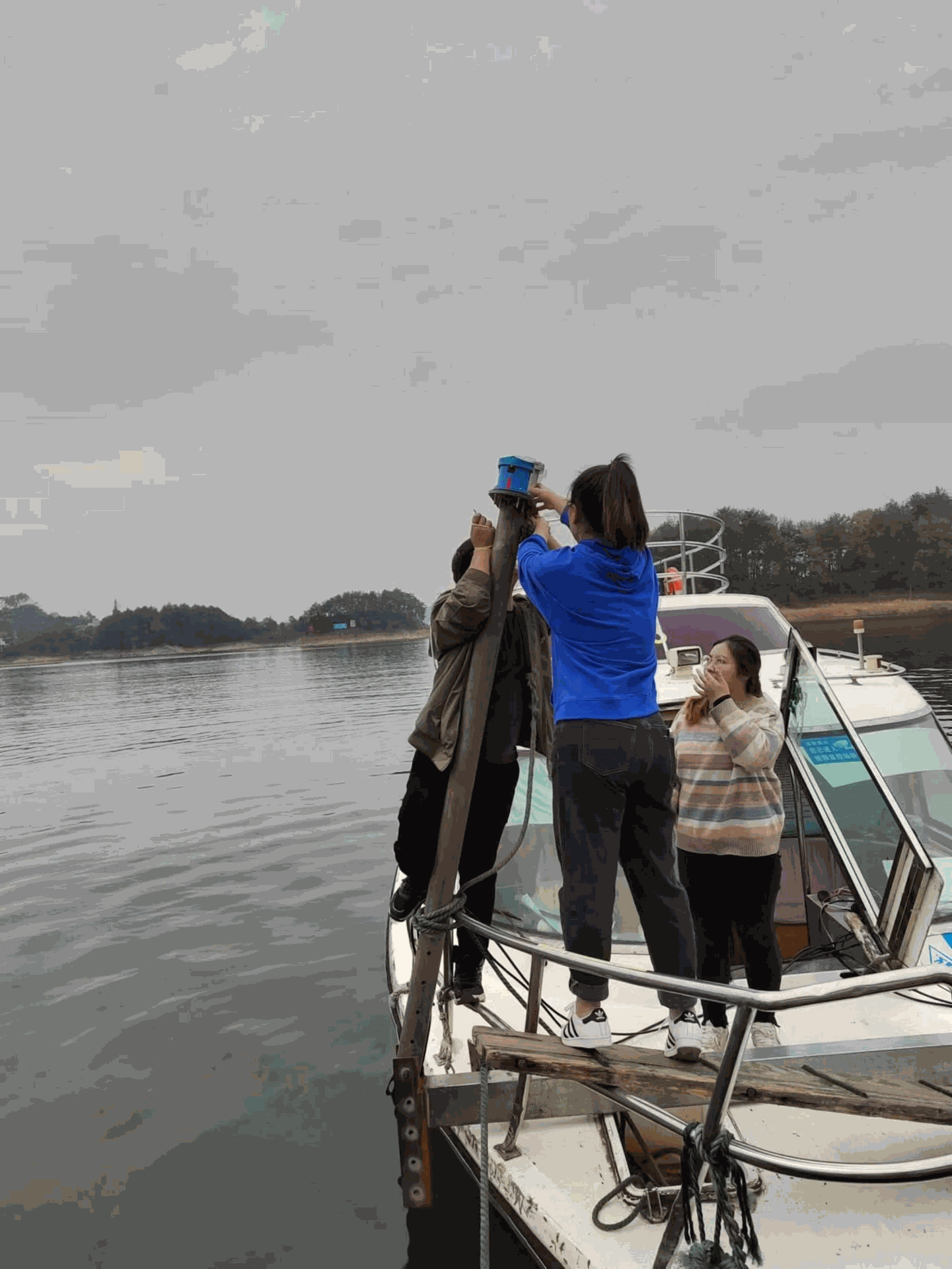
准备阶段:
DVL 设备固定到船体。将定制固定架安装在船体前部,两端共可挂载 4 台 DVL 设备。供电通信缆一端连接设备后,另一端穿过固定架中空部分,放置于船舱内连接电脑串口、锂电池控制。


GPS 安装与调试。定制固定架有 GPS 专用螺杆,将 GPS 旋入螺杆,串口通信线引入船舱内,连接电脑并配置好 GPS 所需输出模式 GPRMC,输出频率 1Hz。
准备稳压电源、示波器等调试工具。
调试阶段:
DVL 内部装配。功率发射、温度传感器、姿态传感器接线检查,是否按照前进方向顺时针接好四路换能器信号,内存卡、功放板到调理板的 7 根排插是否插好。将壳体公座上的插头插到板子插座上,给板子缠好静电胶带,安装密封圈并打好硅脂,封舱。

DVL 设备固定船体前,需进行设备调试。DVL 设备的壳体螺丝锁紧前,连接供电通信缆,上电检查设备版本信息、是否正常工作、温度与姿态传感器数据获取是否正常:使用指南针对准 DVL 的前进方向,查看 DVL 输出的 PD6 结果中,SA 项的航向角是否与指南针方向相同;SA 项的温度是否与实际环境温度大致相符。确认无误后,锁紧螺丝和通电通信母缆的锁紧盖,将设备固定好并放入水中。
五、试验结果
两台DVL-600K 安装方式如下图所示:
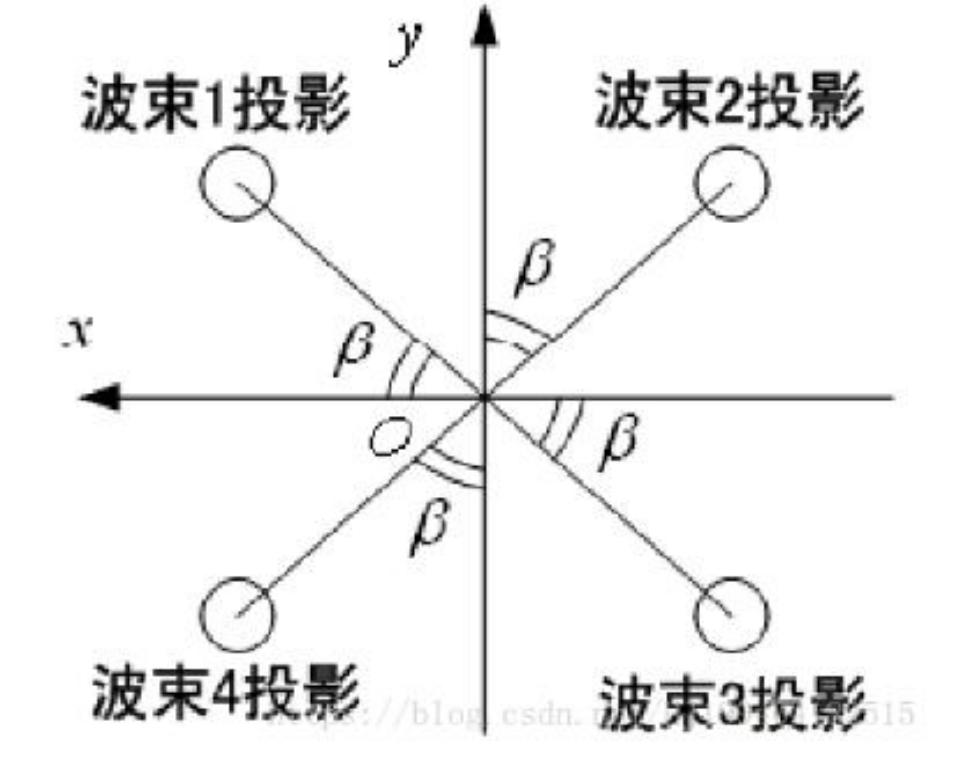
其中x为船前进方向,设备 1(下图中蓝色设备)夹角为 45 ° , 设备 2(下图中银色设备)夹角为 0 °。
航线试验过程中,设备的参数设置为自动设置,根据实时测量的湖底深度自动调整发射信号的脉宽、功率等参数,操作简洁。
设备1试验结果:
设备 1 总共完成 3 条有效航线,航线试验过程中,设备的参数设置为自动设置,根据实时测量的湖底深度自动调整发射信号的脉宽、功率等参数,操作简洁。
航线 1 历时约 1600s,期间试验船保持约 7~8 节的速度行驶,总航程约 6.5km, 整个过程设备湖底跟踪稳定,船速测量稳定精确,航程计算精确。底跟踪、测速和航程计算结果分别如图6~11所示。
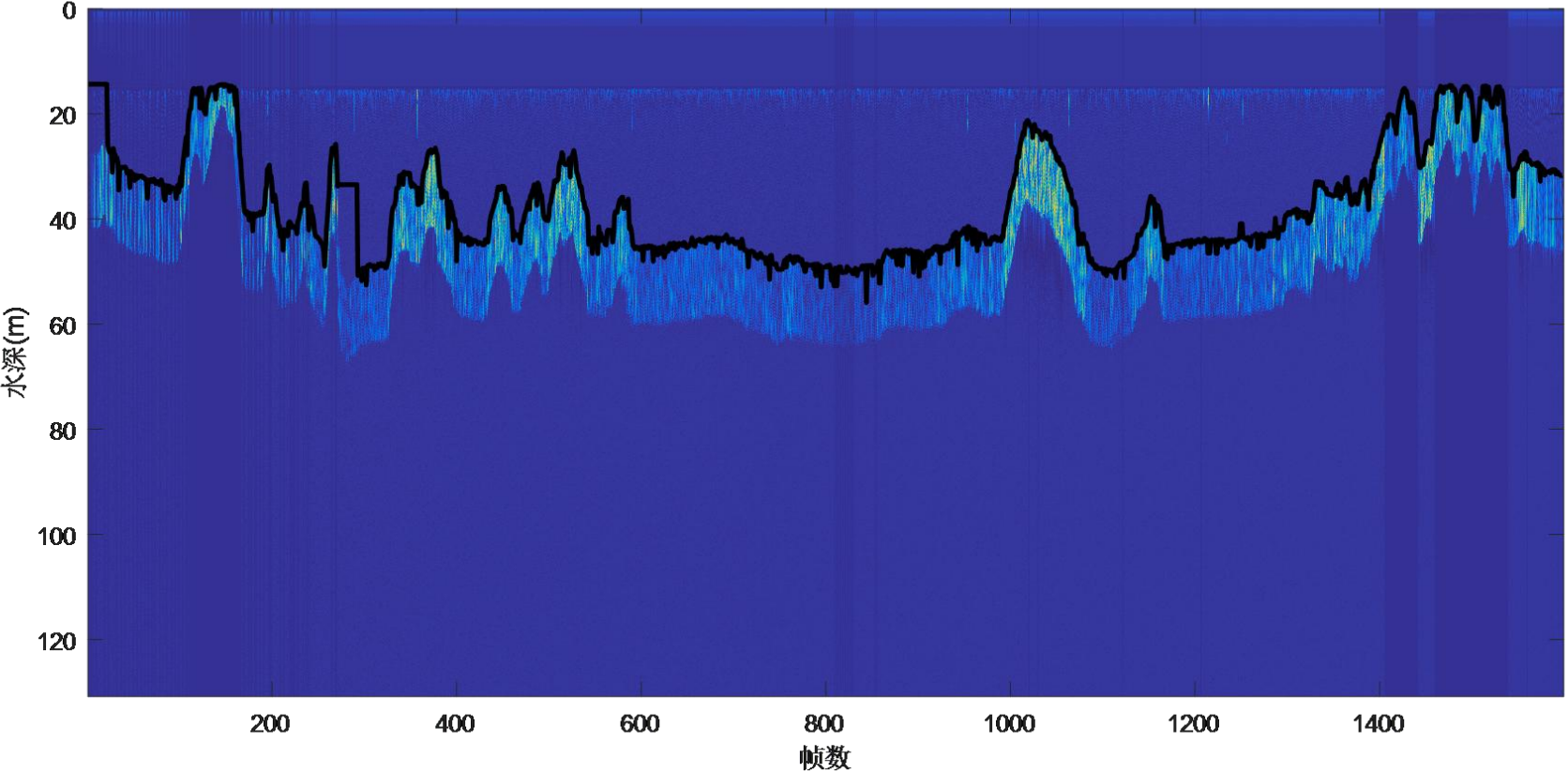
图1:湖底稳定跟踪结果
从图1中可以看出,航线 1 过程中,湖底高低起伏变化剧烈,从 20m 到 50m 起伏不断,但是设备 1 依然能保持稳定的湖底跟踪,证明本设备具备稳定跟踪复杂湖(海)底的能力。
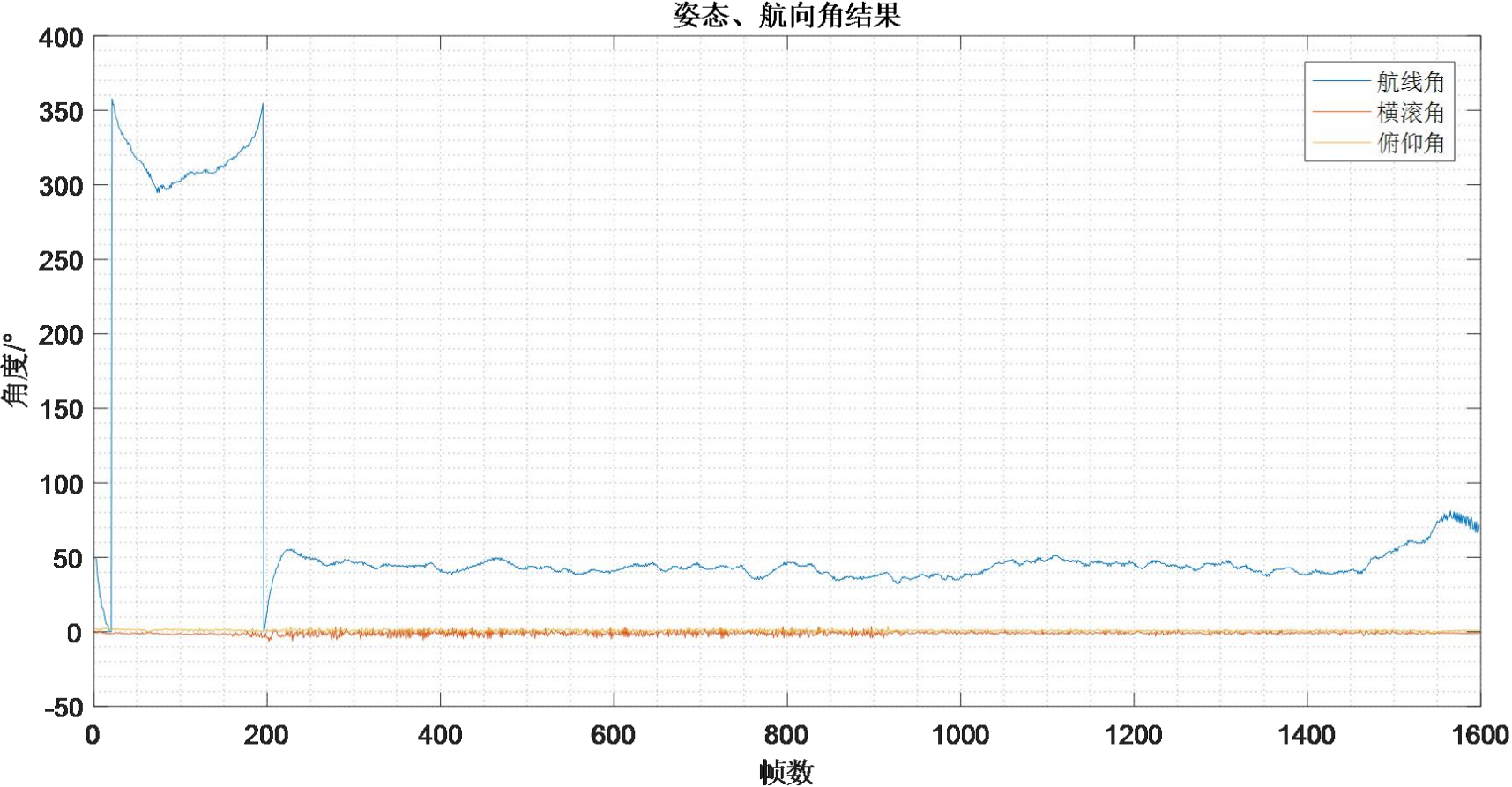
图 2:姿态、航向角
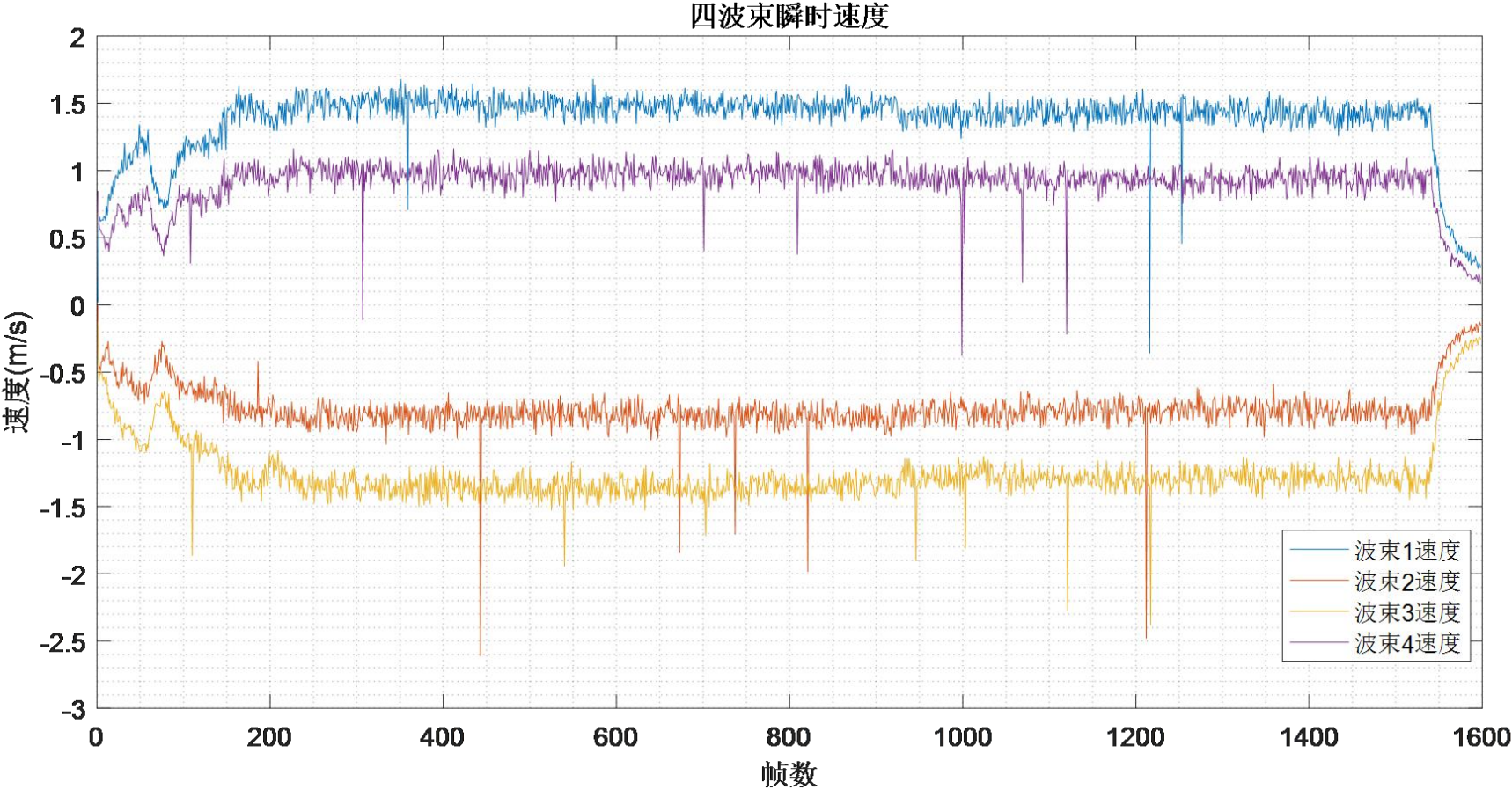
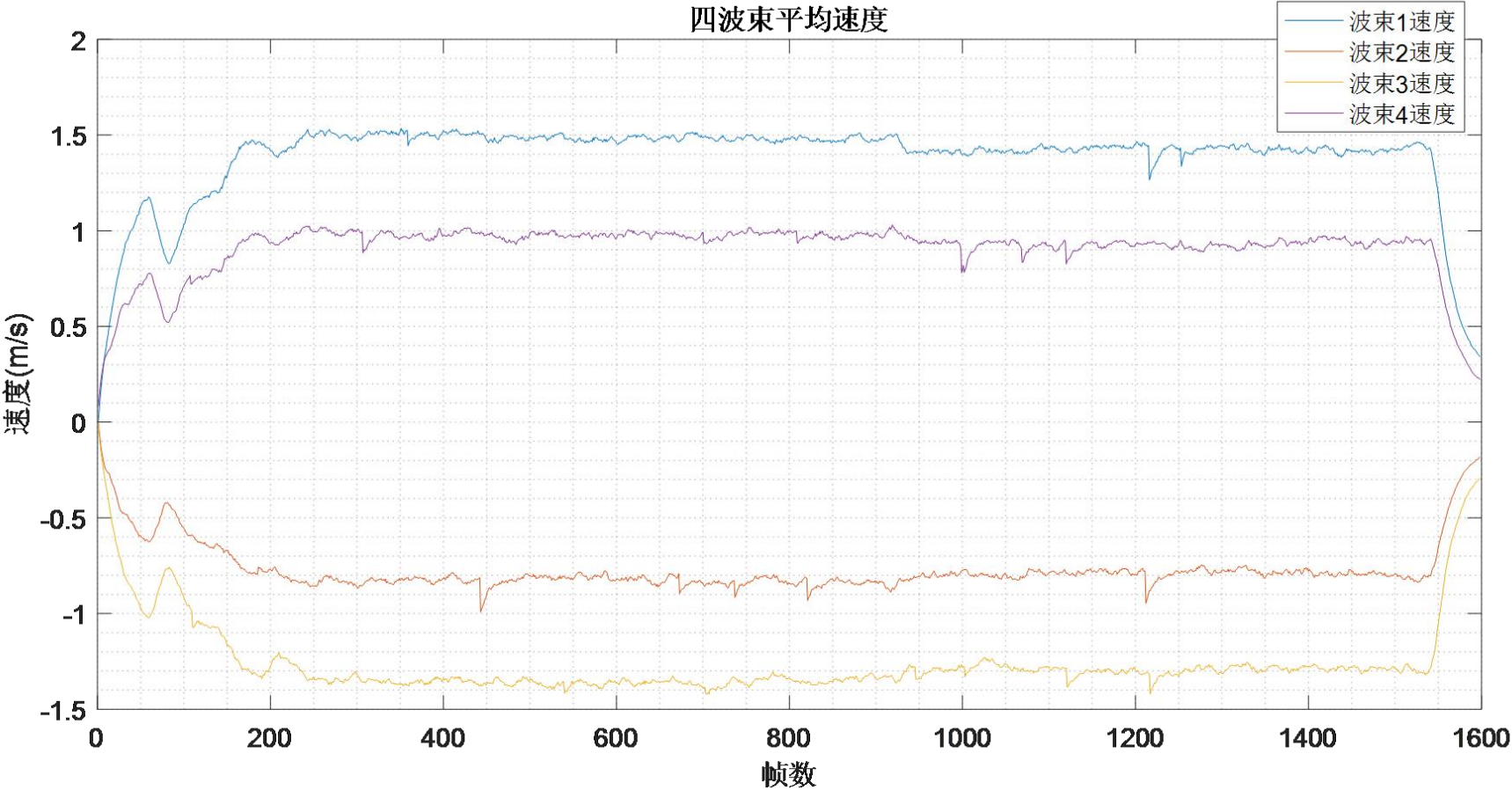
图3:波束坐标下速度计算结果
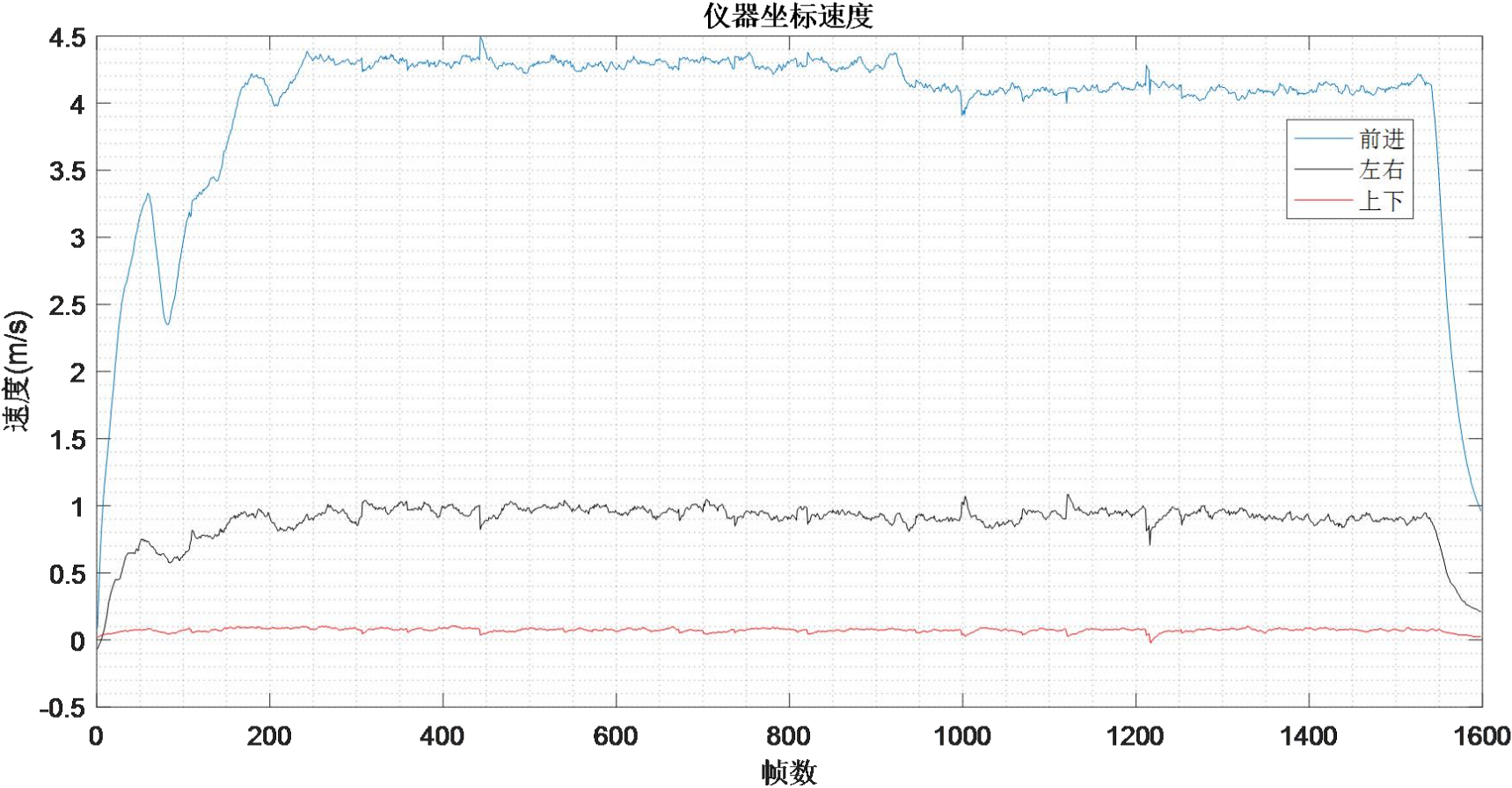
图 4:仪器坐标下速度计算结果

图5:大地坐标下速度计算结果
从图2~5中可以看出,航线 1 过程中,DVL-600K计算的波束坐标、仪器坐标和大地坐标下的速度稳定,且与实际的船速基本一致,可以证明本设备具有稳定、精确地测量速度的能力。
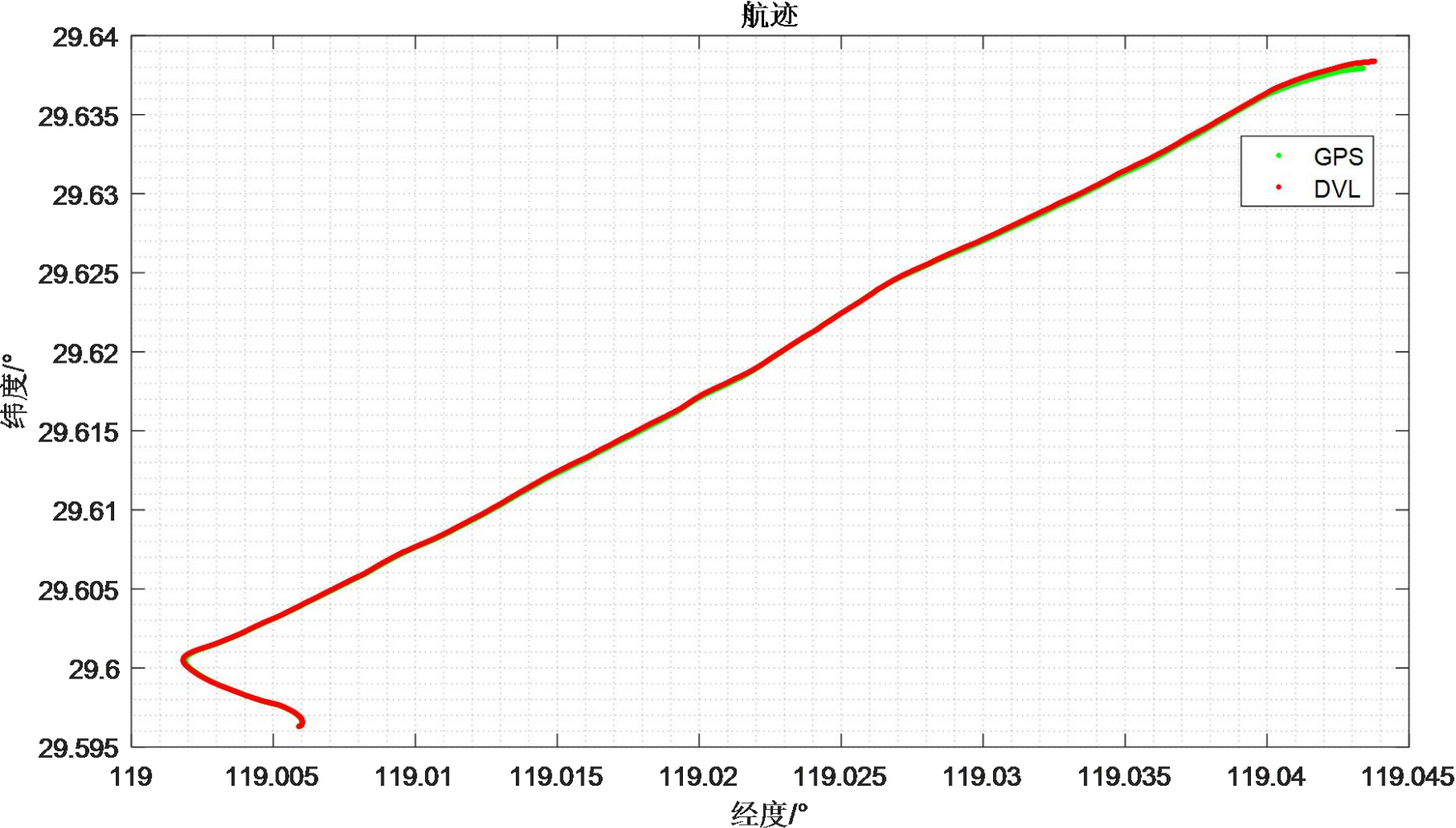
图6:DVL 与 GSP 航程比对结果
从图6中可以看出,航线 1 过程中,DVL-600K 计算的航程(红色)与 GPS(绿色)记录的航程基本一致,经计算总航程 6458.3m,两者终点偏差 19.1m, 相对误差为 2.9‰ ,足以证明本设备具有精确的航程计算能力。
航线 2 历时约 700s,期间试验船保持约 6~7 节的速度行驶,总航程约 2.5km, 整个过程设备湖底跟踪稳定,船速测量稳定精确,航程计算精确。底跟踪、测速 和航程计算结果分别如图 3.12~3.17 所示。
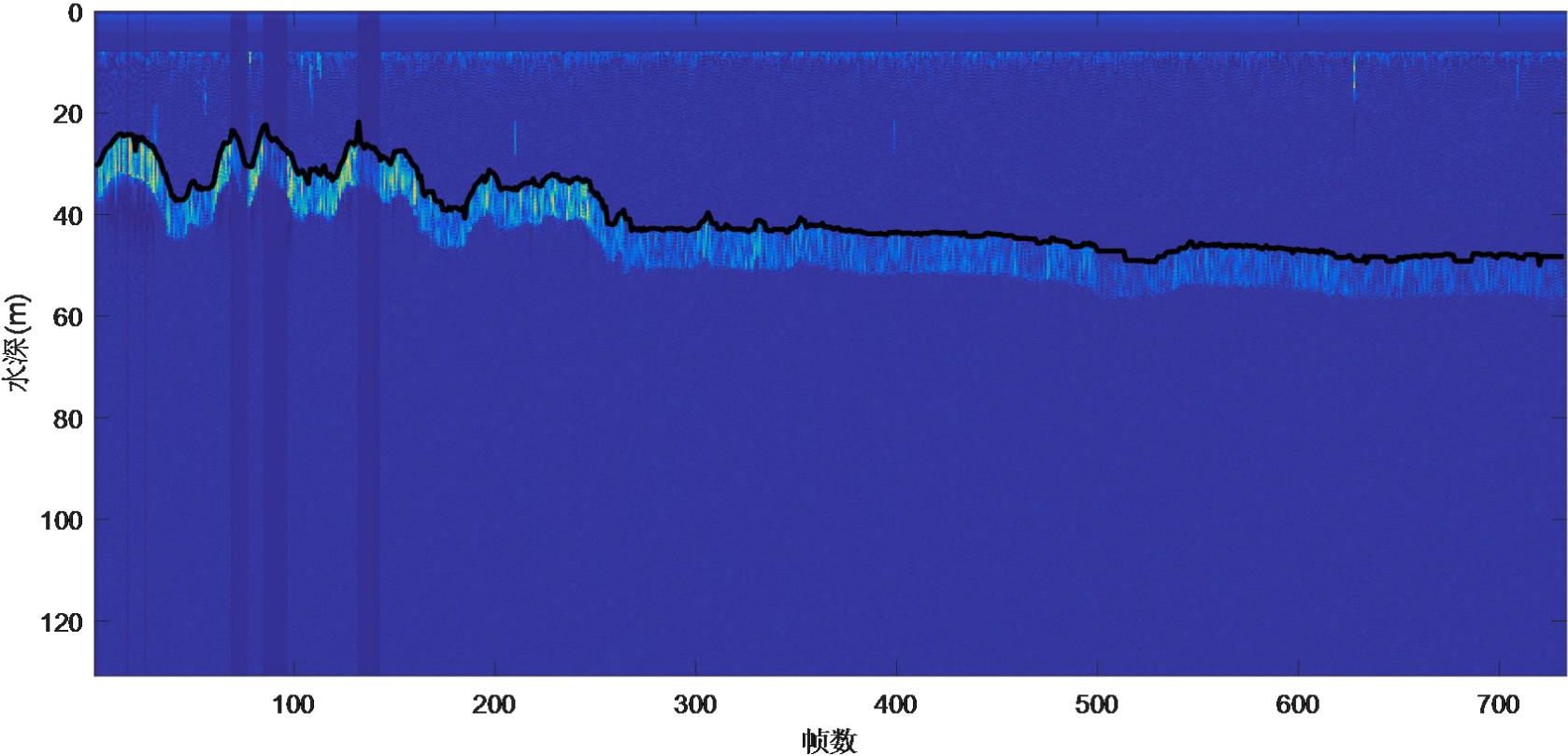
图7:湖底稳定跟踪结果
从图7中可以看出,航线 2 过程中,湖底高低起伏一开始变化剧烈,后趋于稳定,从 20m 到 60m 起伏不断,但是设备 1 依然能保持稳定的湖底跟踪,证明 本设备具备稳定跟踪复杂湖(海)底的能力。
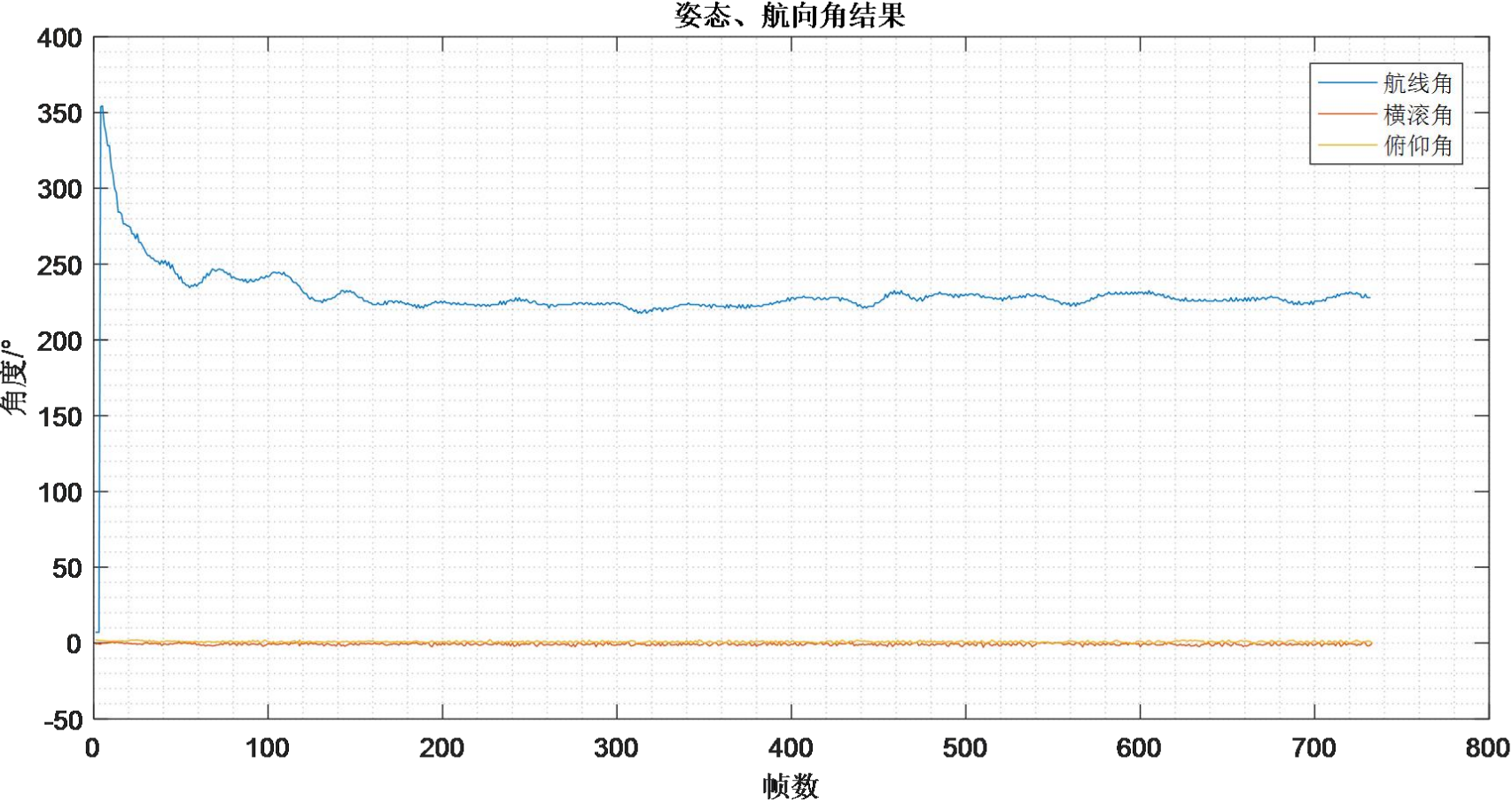
图8:姿态、航向角
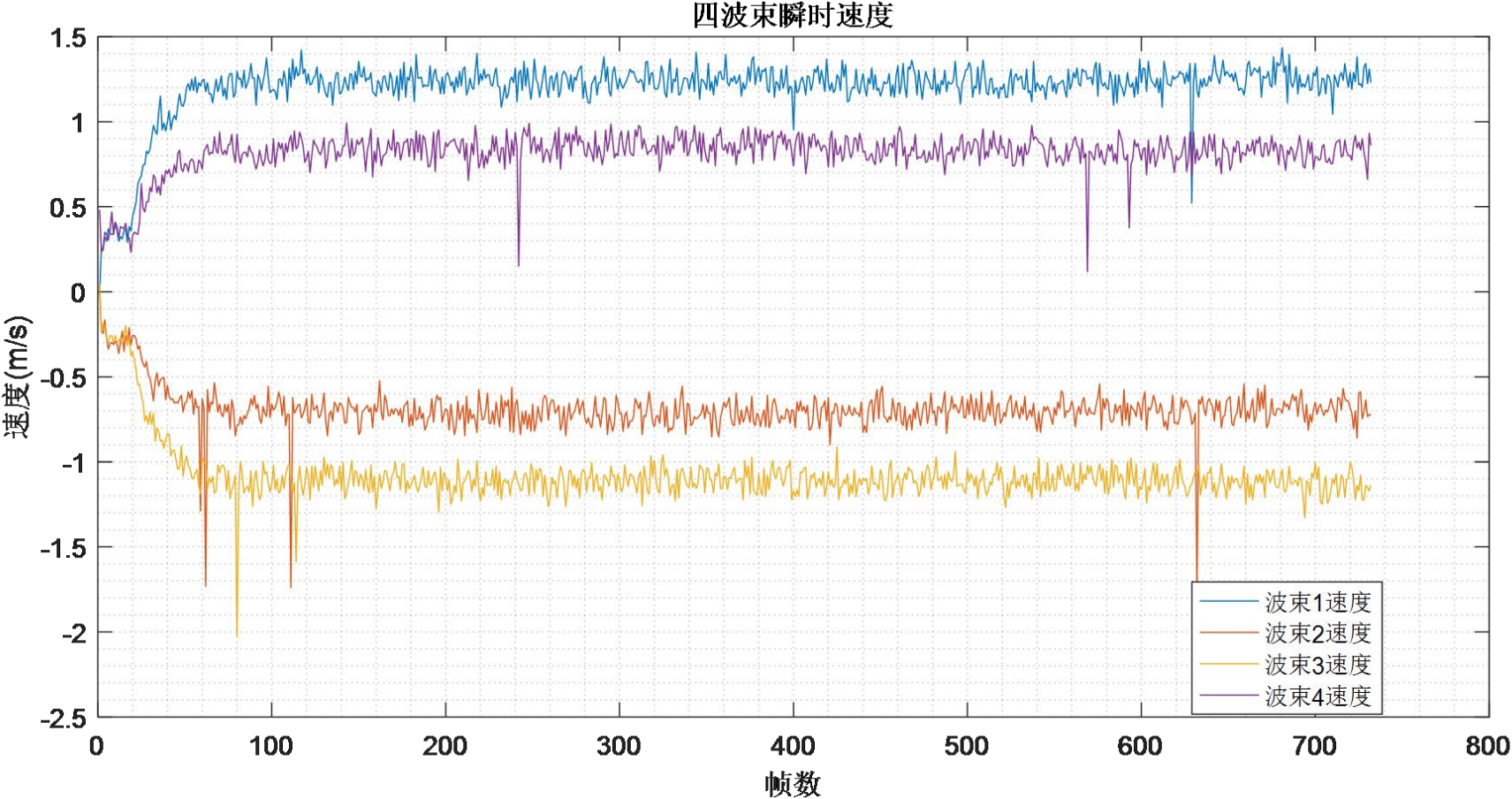
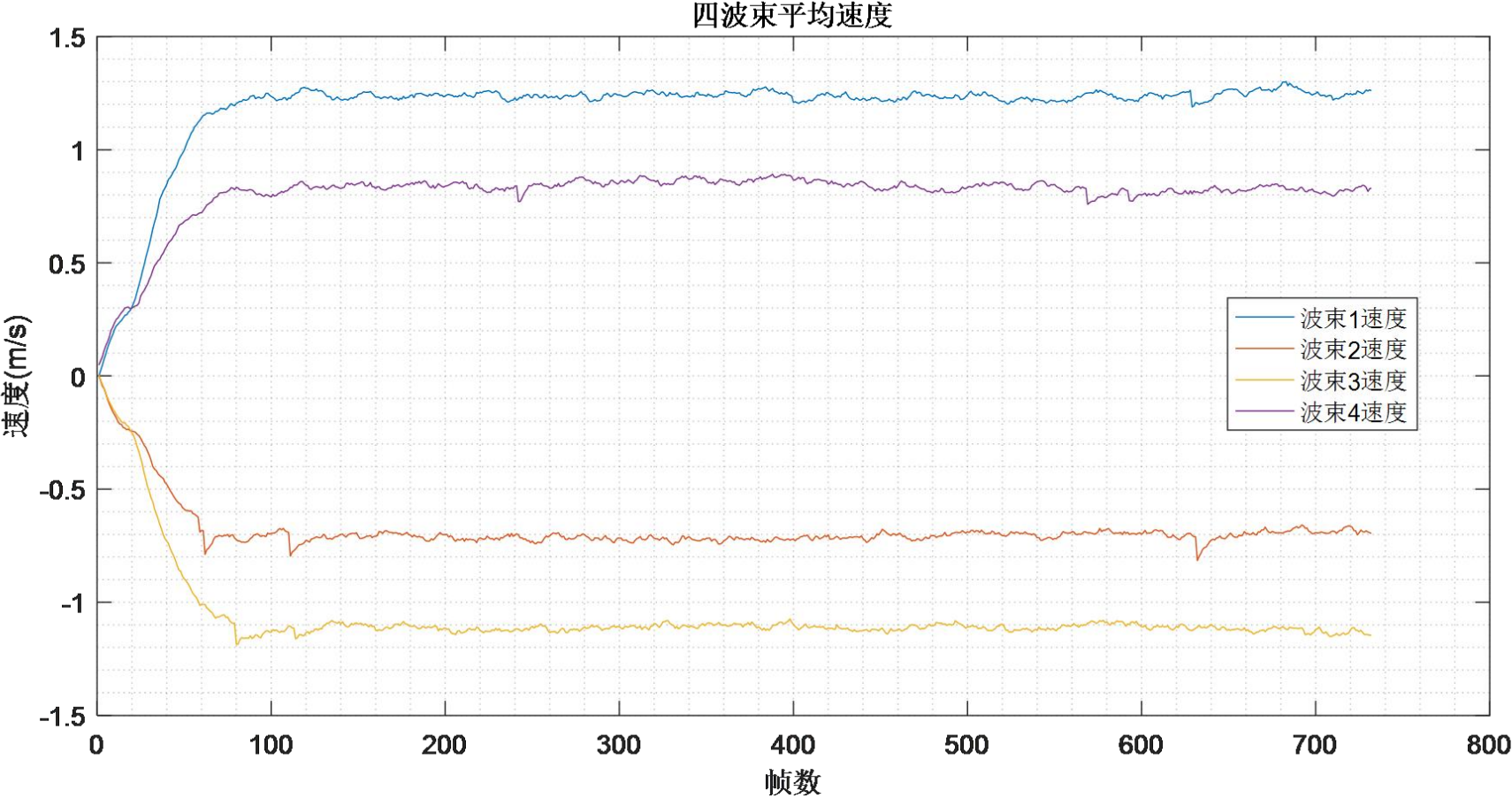
图9:波束坐标下速度计算结果
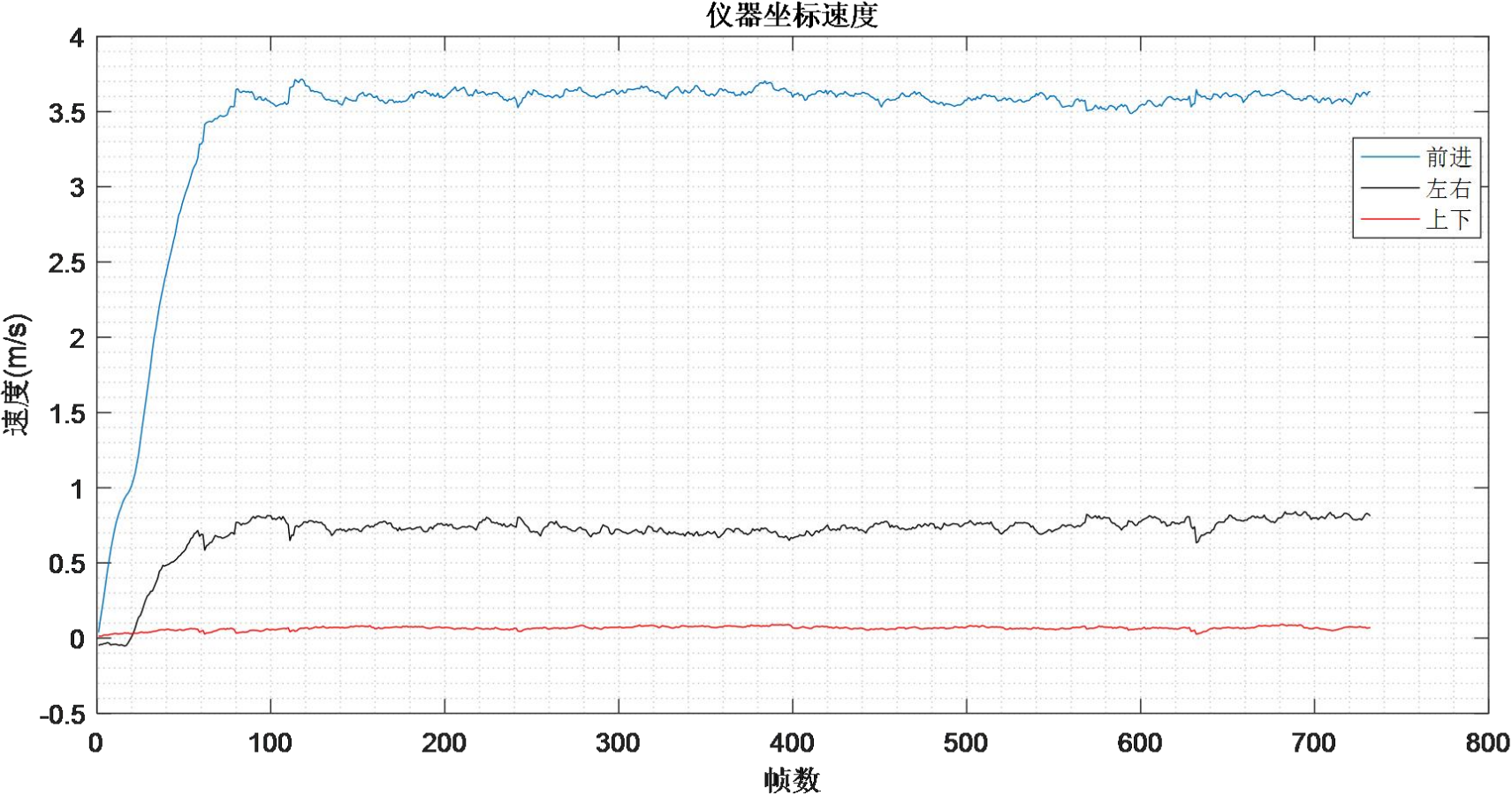
图10:仪器坐标下速度计算结果
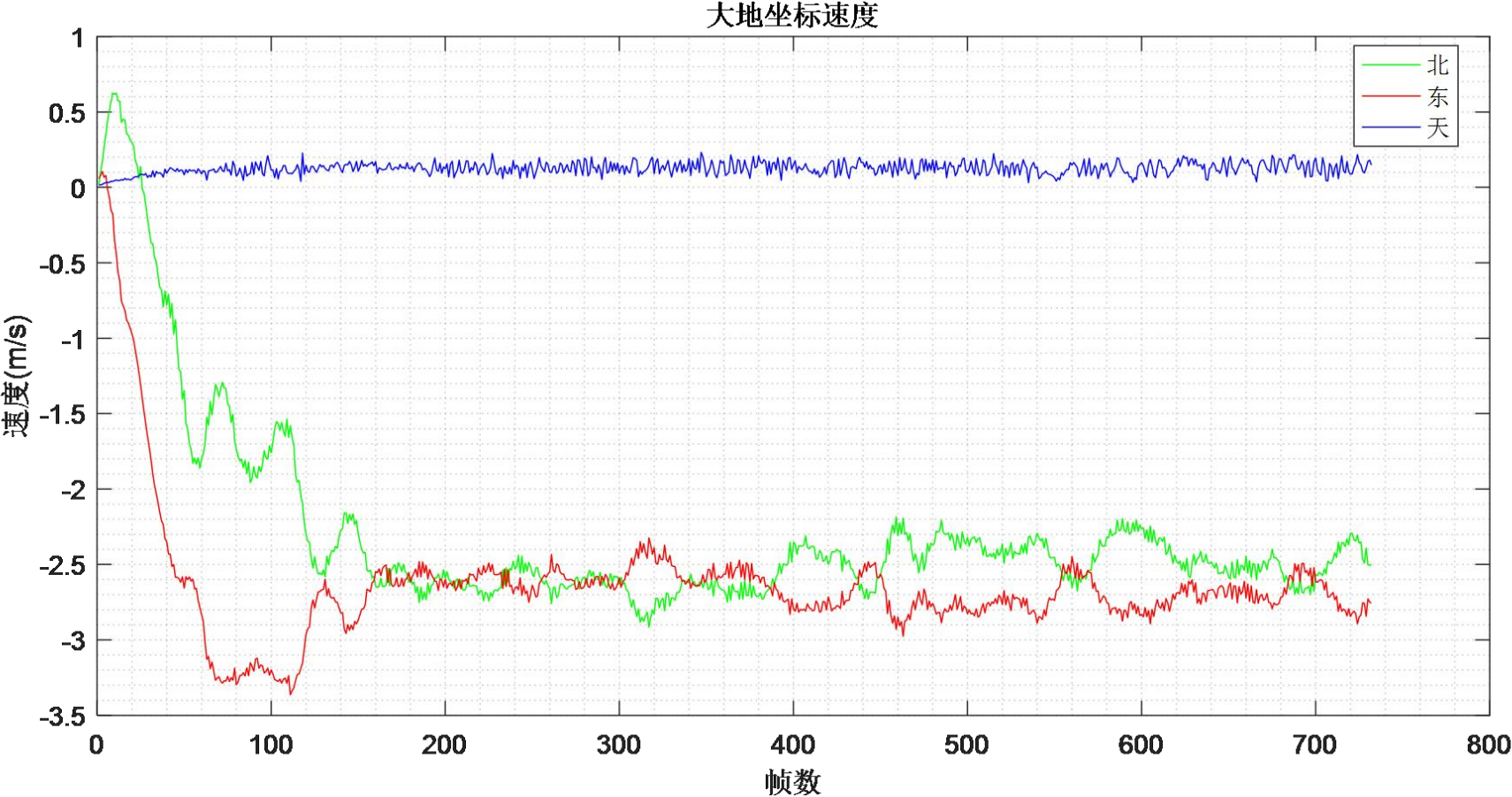
图11:大地坐标下速度计算结果
从图 8-11中可以看出,航线 2 过程中,DVL-600K 计算的波束坐标、仪器坐标和大地坐标下的速度稳定,且与实际的船速基本一致,可以证明本设备具有稳定、精确地测量速度的能力。
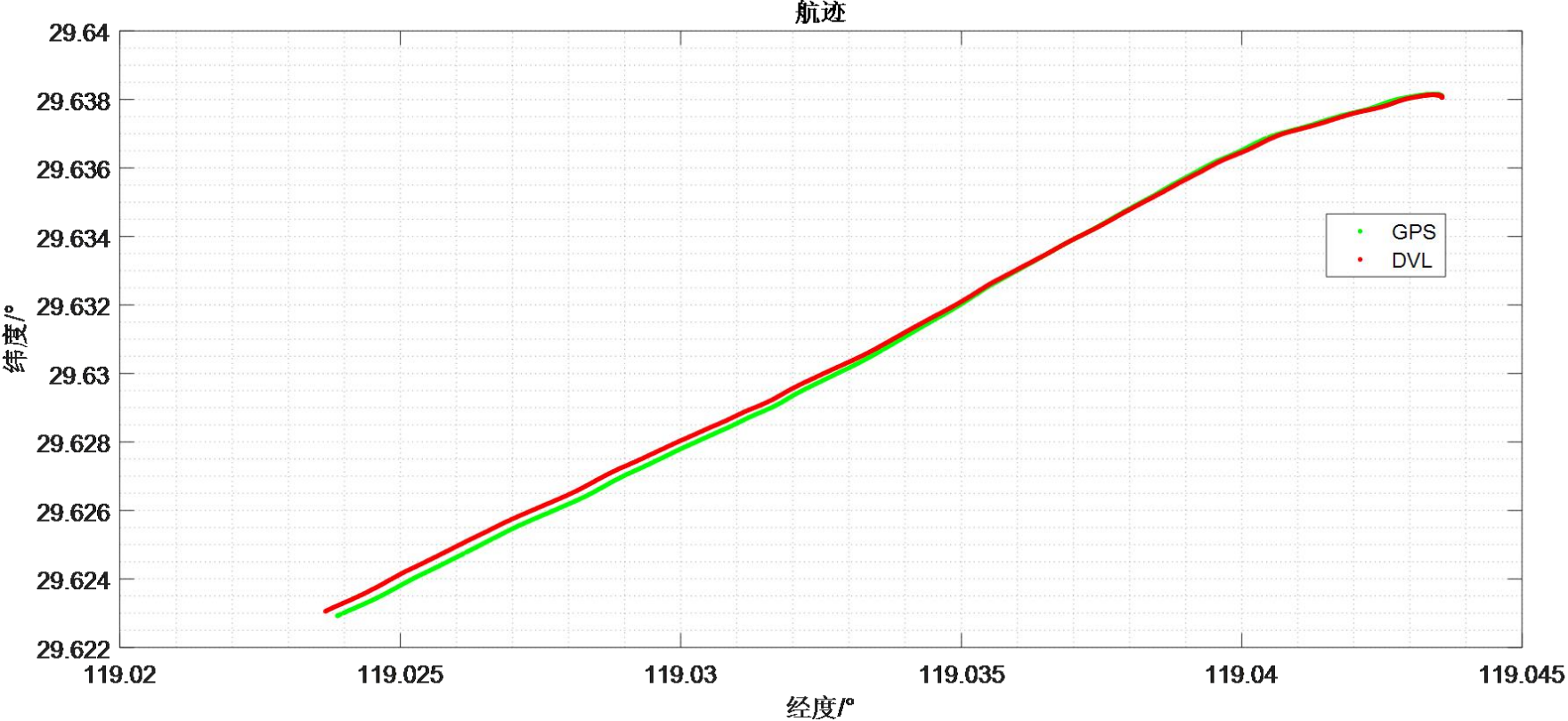
图12:DVL 与 GSP 航程比对结果
从图12中可以看出,航线 2 过程中,DVL-600K 计算的航程(红色)与 GPS(绿色)记录的航程基本一致,经计算总航程 2575.6m,两者终点偏差 6.2m,相 对误差为 2.4‰ ,足以证明本设备具有精确的航程计算能力。
航线 3 历时约 700s,期间试验船保持约 7~8 节的速度行驶,总航程约 3km, 整个过程设备湖底跟踪稳定,船速测量稳定精确,航程计算精确。底跟踪、测速 和航程计算结果分别如图13~18所示。
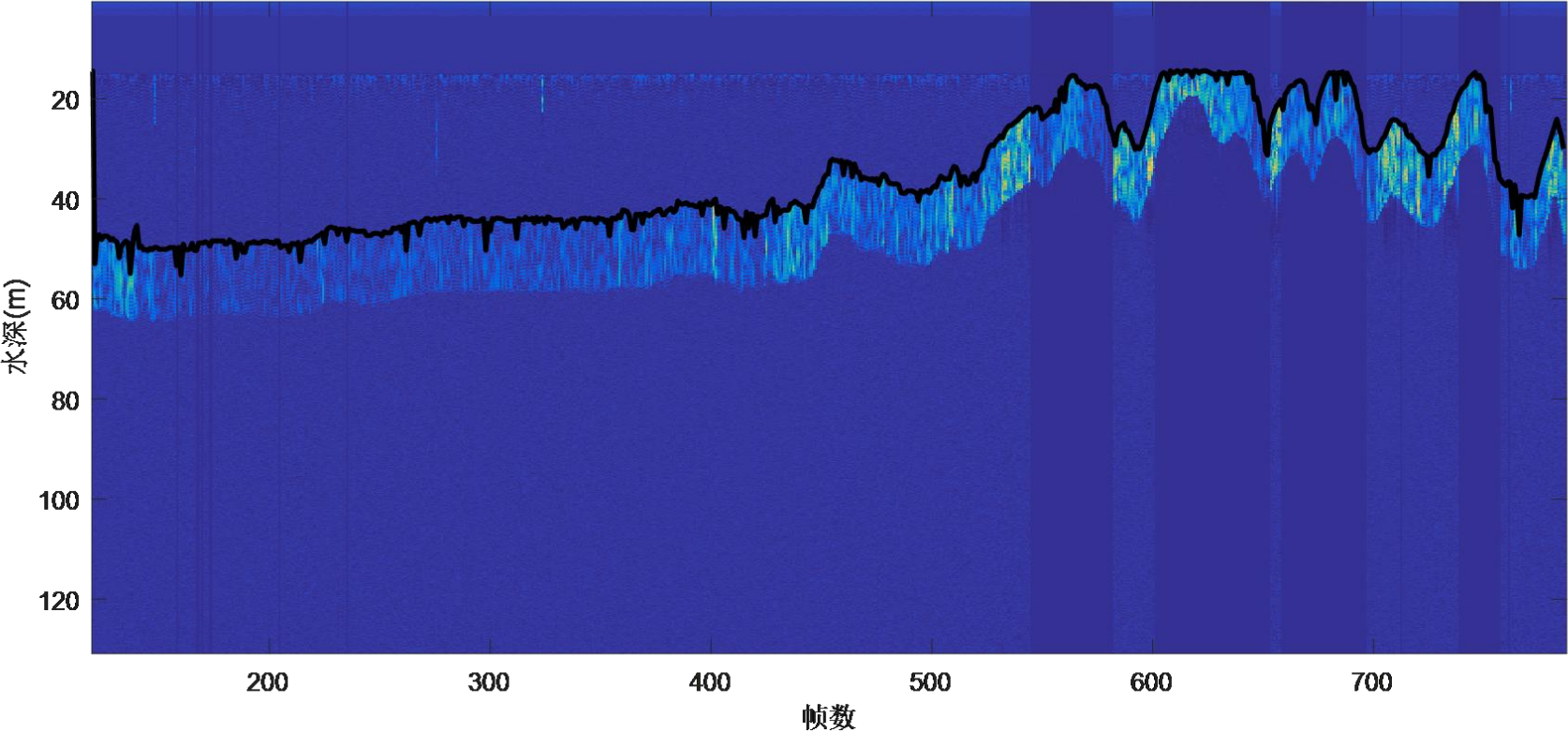
图13:湖底稳定跟踪结果
从图13中可以看出,航线3过程中,湖底高低起伏一开始缓慢变浅,后变化剧烈,从 20m 到 55m 起伏不断,但是设备 1 依然能保持稳定的湖底跟踪,证明本设备具备稳定跟踪复杂湖(海)底的能力。
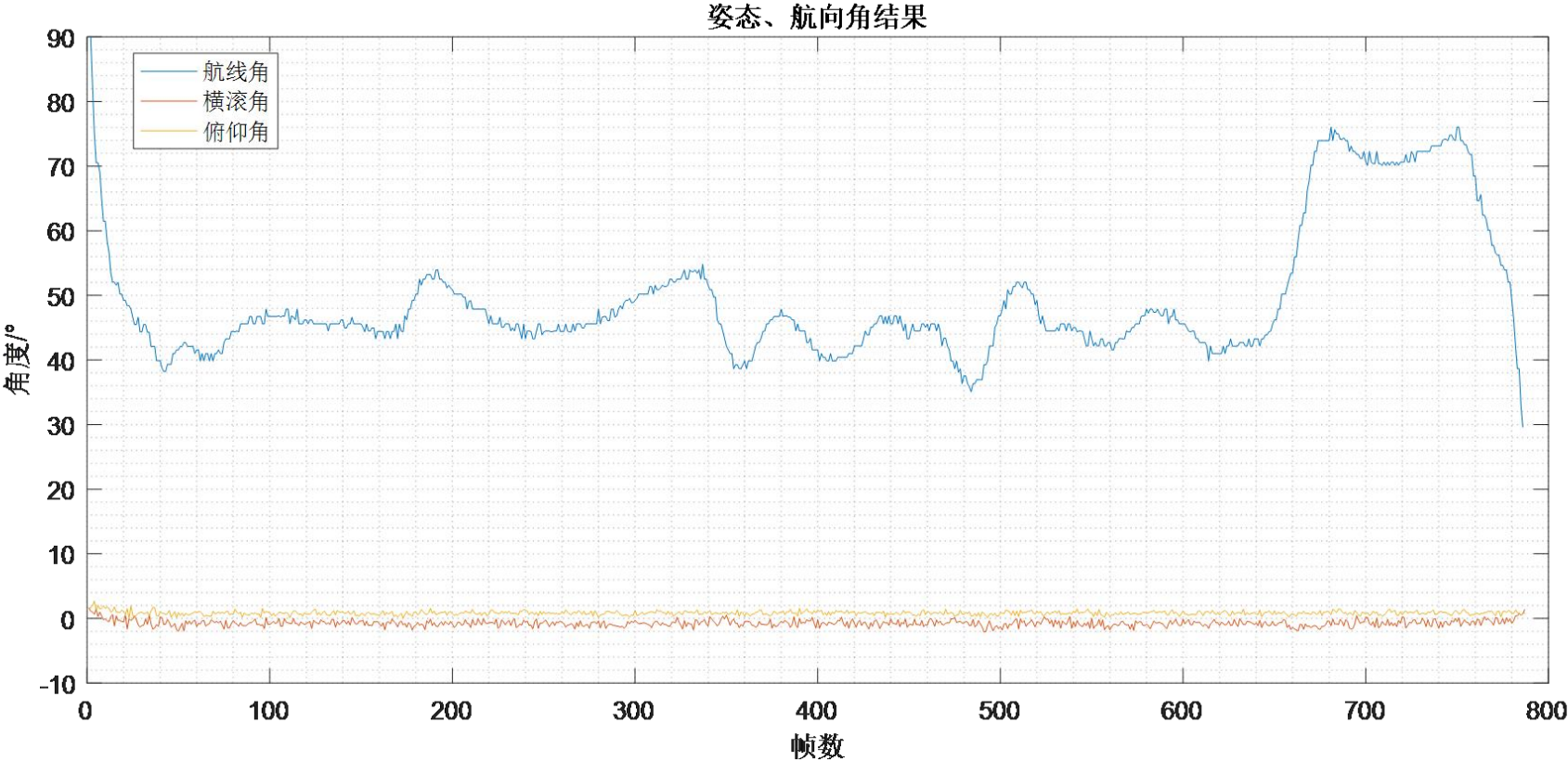
图14:姿态、航向角
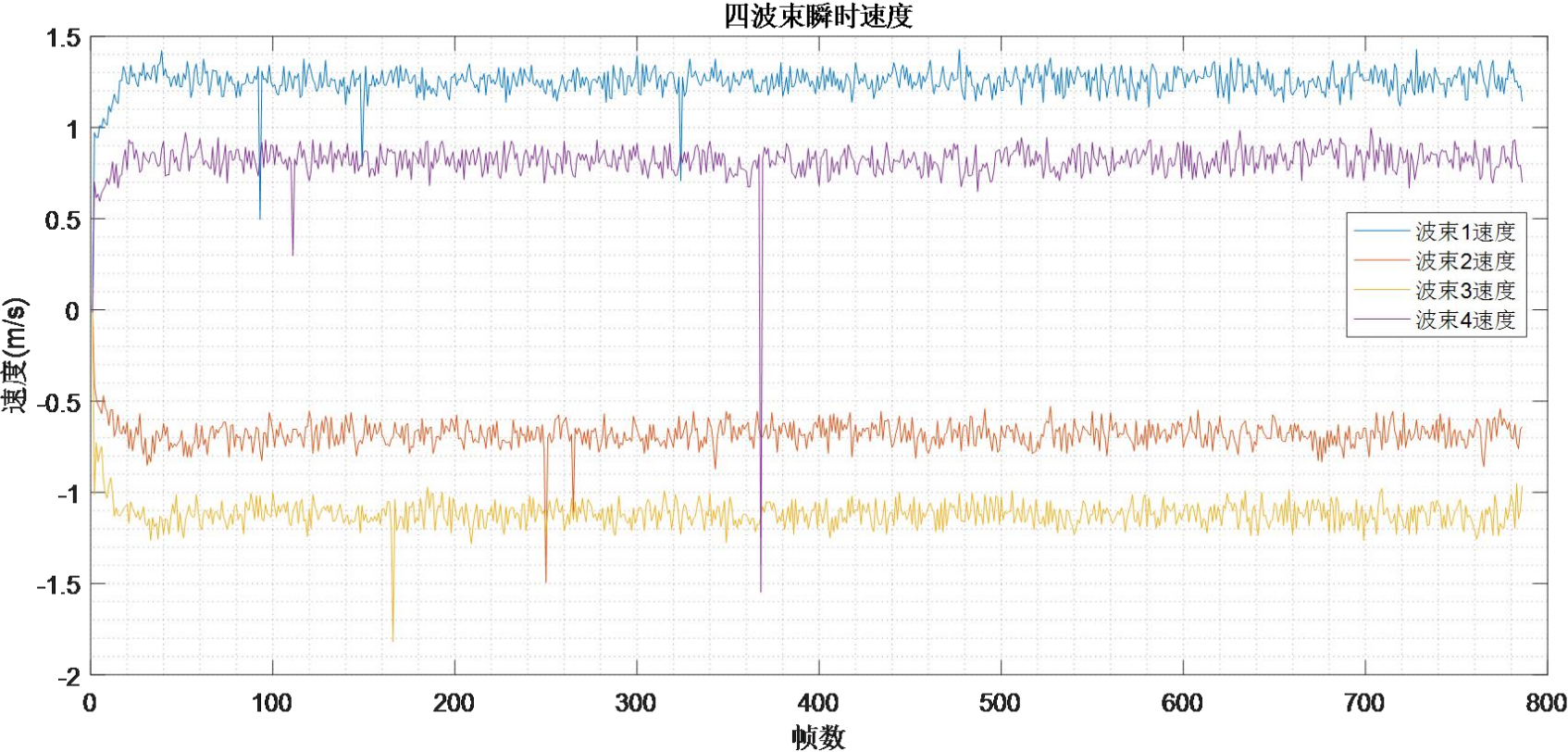
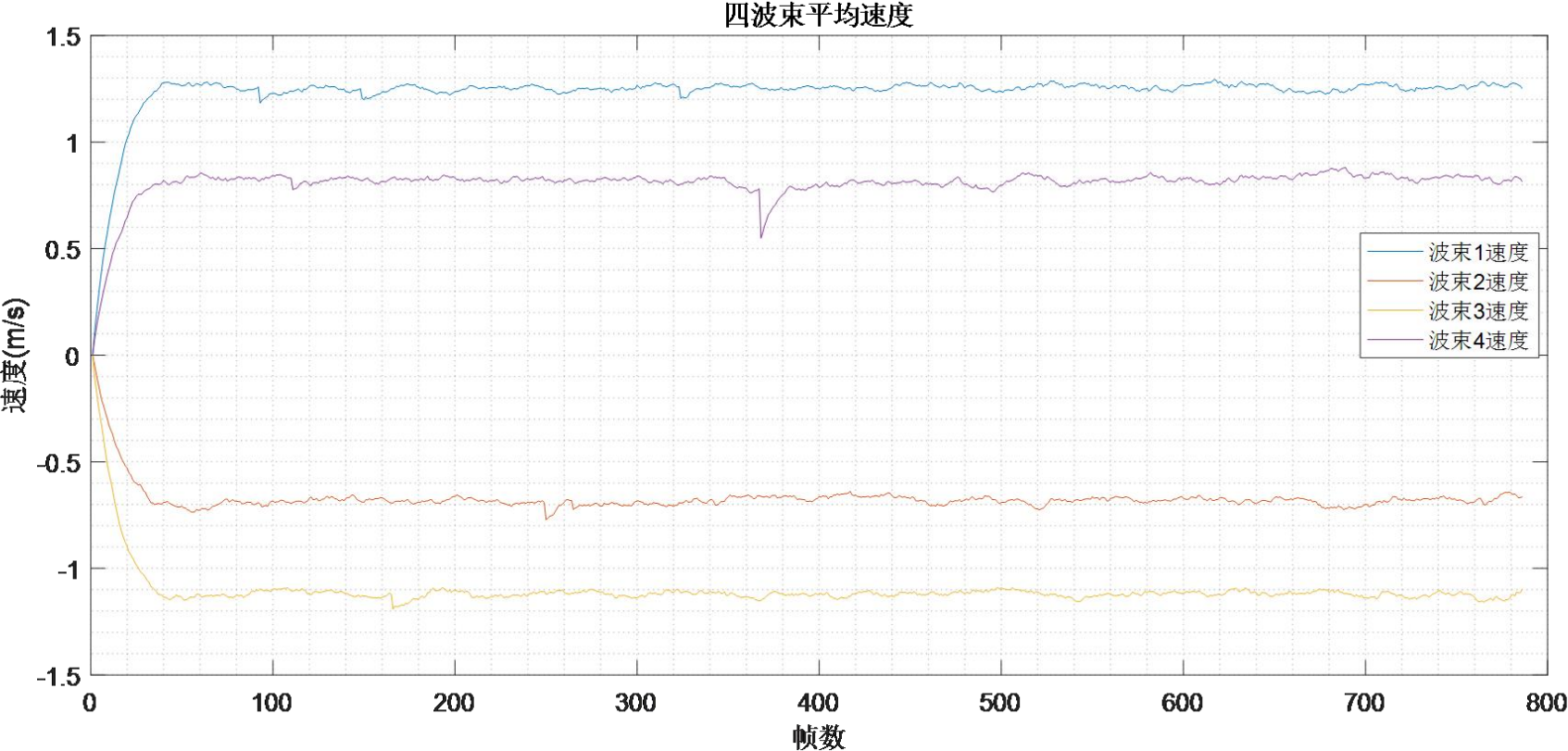
图15:波束坐标下速度计算结果
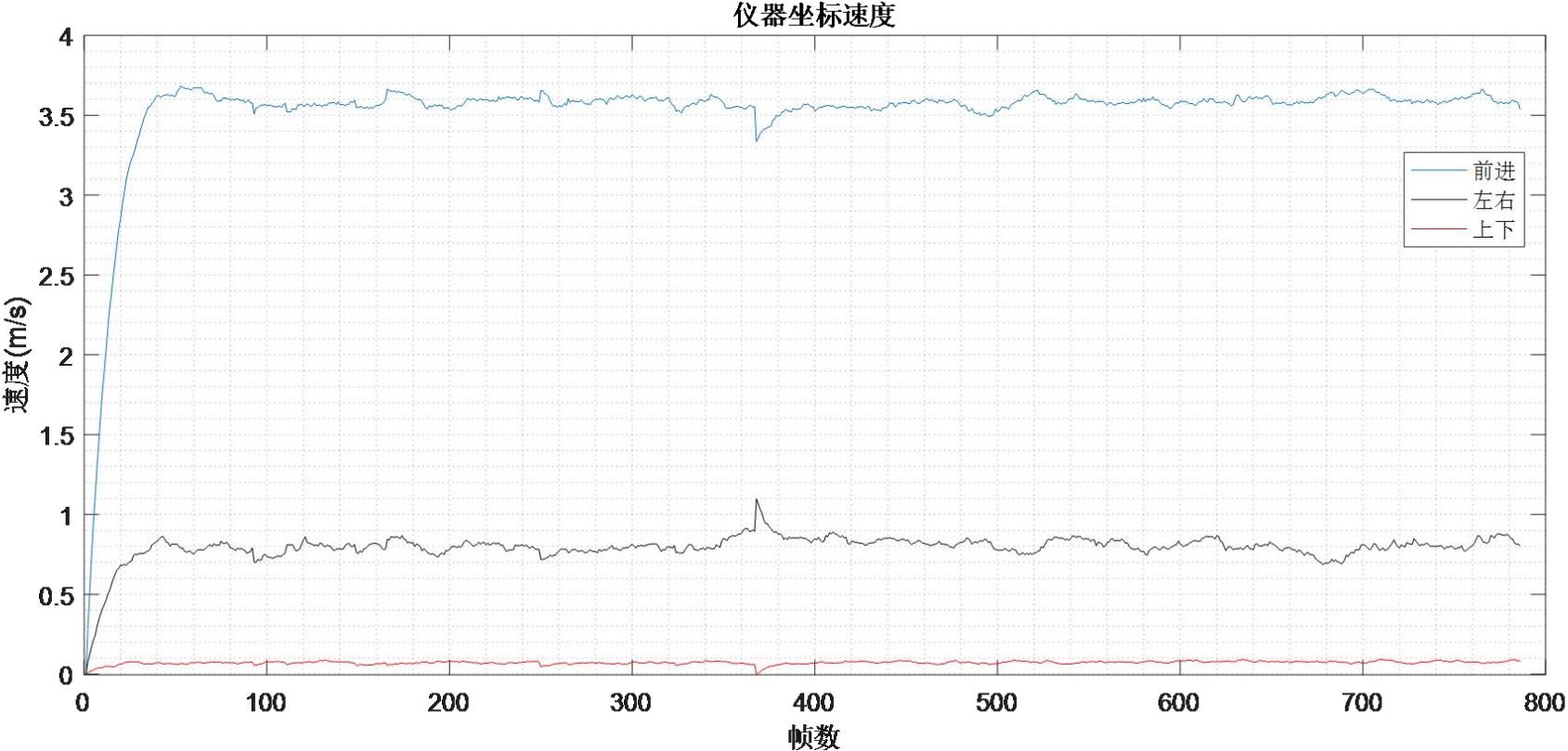
图16:仪器坐标下速度计算结果
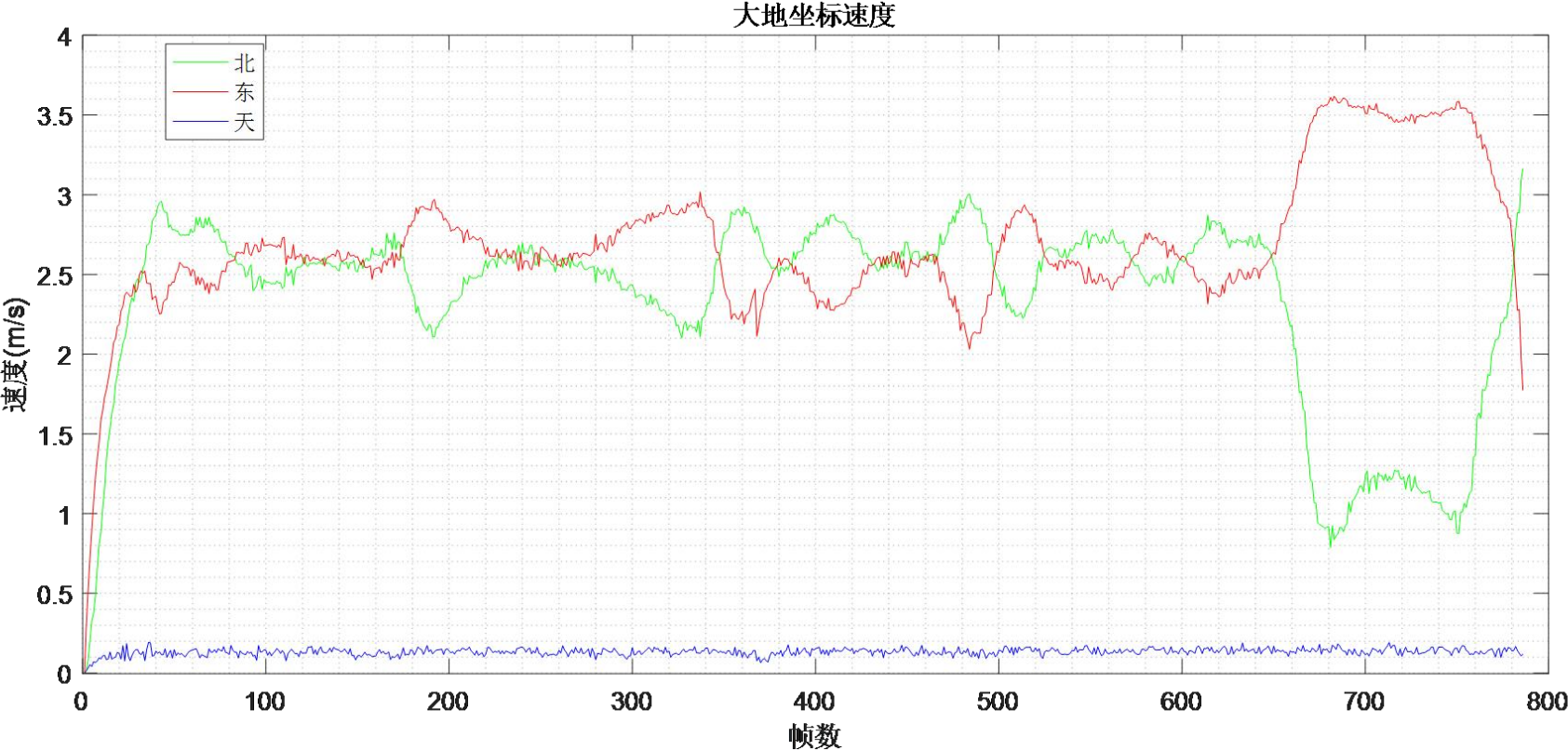
图17:大地坐标下速度计算结果
从图14~17中可以看出,航线 3 过程中,DVL-600K 计算的波束坐标、仪器坐标和大地坐标下的速度稳定,且与实际的船速基本一致,可以证明本设备具有稳定、精确地测量速度的能力。
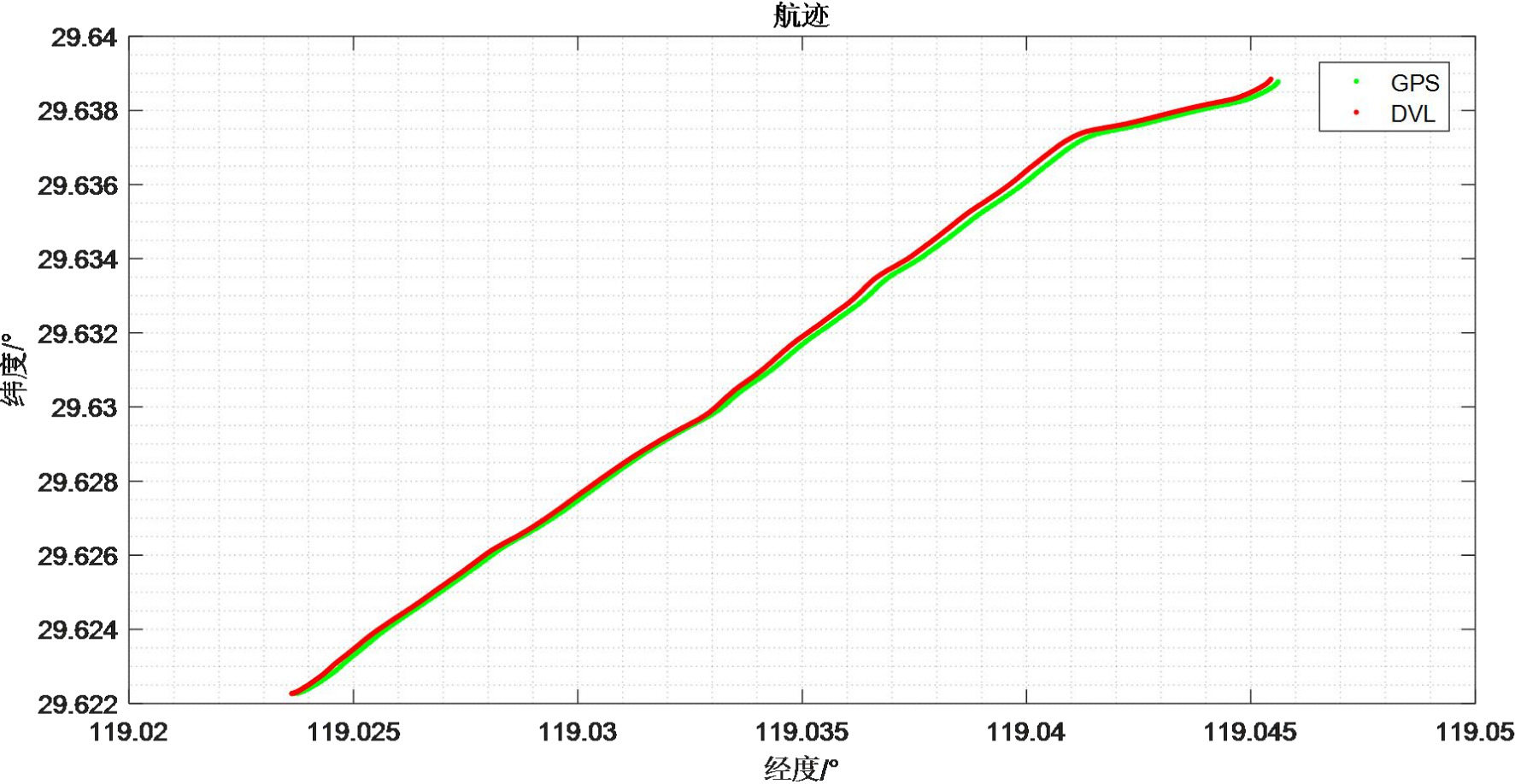
图18:DVL 与 GSP 航程比对结果
从图18中可以看出,航线 3 过程中,DVL-600K 计算的航程(红色)与 GPS (绿色)记录的航程基本一致,经计算总航程 2848.1m,两者终点偏差 7.8m,相对误差为 2.7‰ ,足以证明本设备具有精确的航程计算能力。
设备2试验结果:
设备 2 总共完成 3 条有效航线,航线试验过程中,设备的参数设置为自动设 置,根据实时测量的湖底深度自动调整发射信号的脉宽、功率等参数,操作简洁。
航线 1 历时约 700s,期间试验船保持约 7~8 节的速度行驶,总航程约 2.7km, 整个过程设备湖底跟踪稳定,船速测量稳定精确,航程计算精确。底跟踪、测速和航程计算结果分别如图19~24所示。
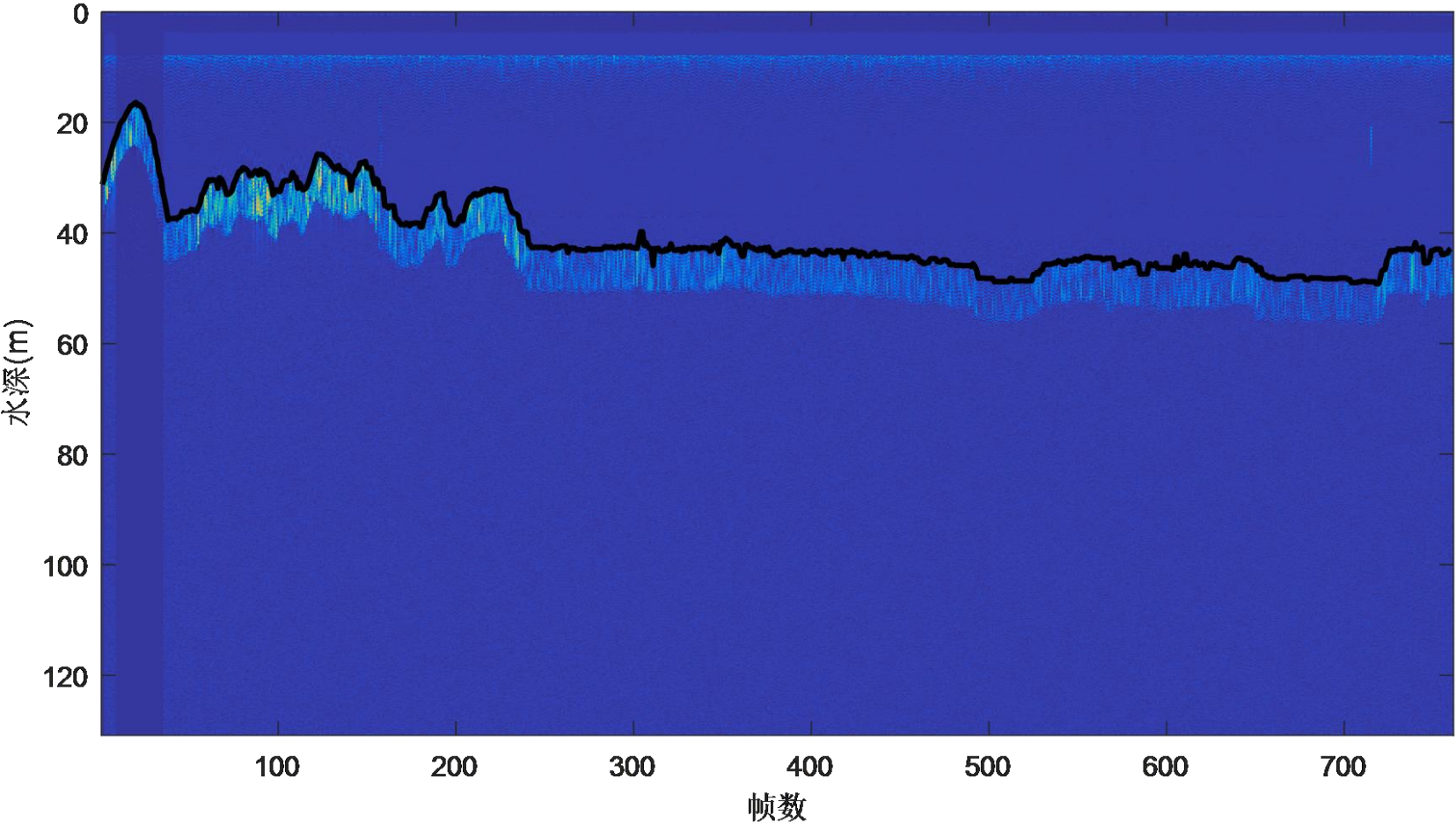
图19:湖底稳定跟踪结果
从图19中可以看出,航线 1 过程中,湖底高低起伏变化相对剧烈,从 20m 到 50m 起伏不断,但是设备 2 依然能保持稳定的湖底跟踪,证明本设备具备稳定跟踪复杂湖(海)底的能力。
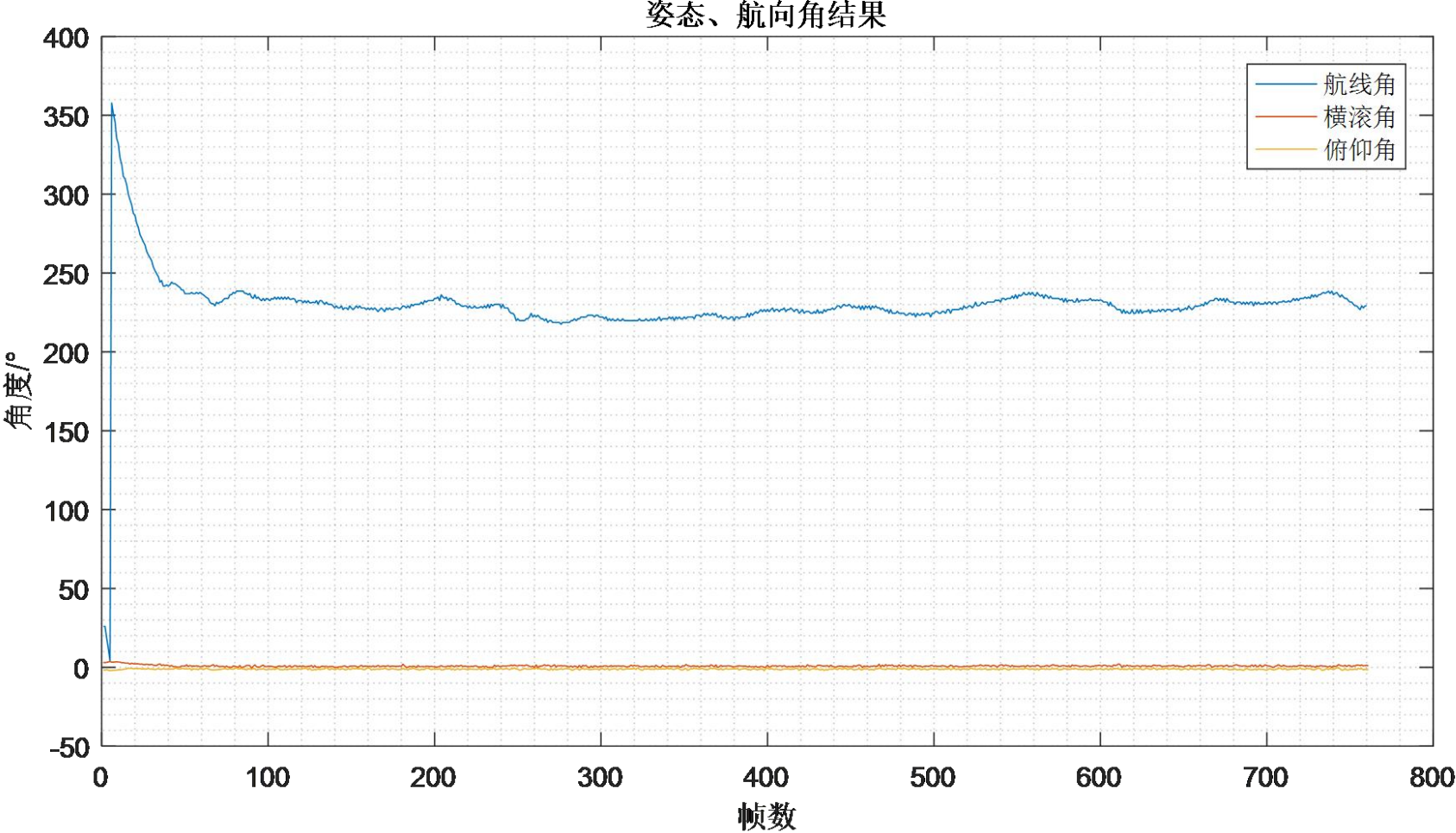
图 20:姿态、航向角
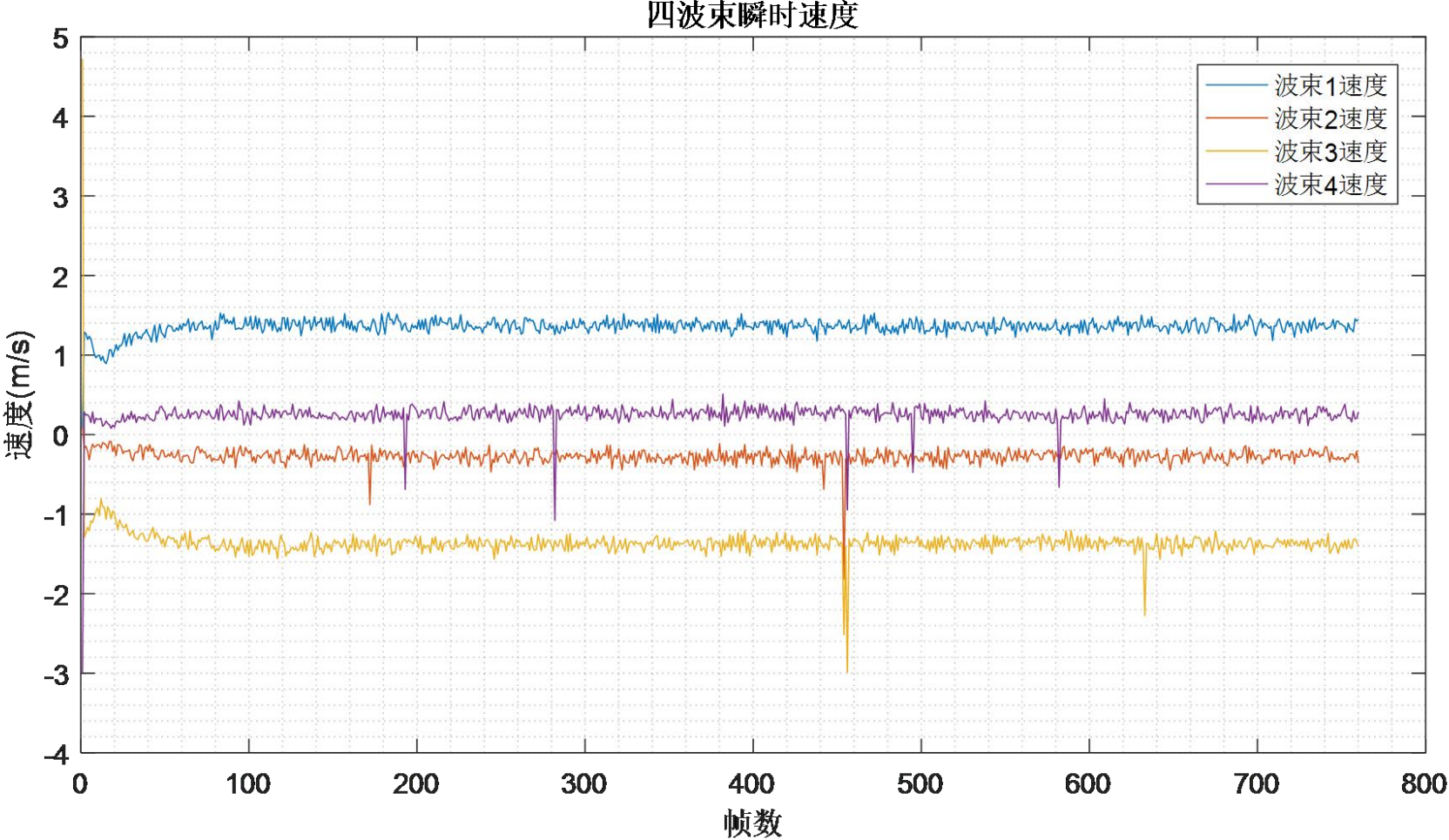
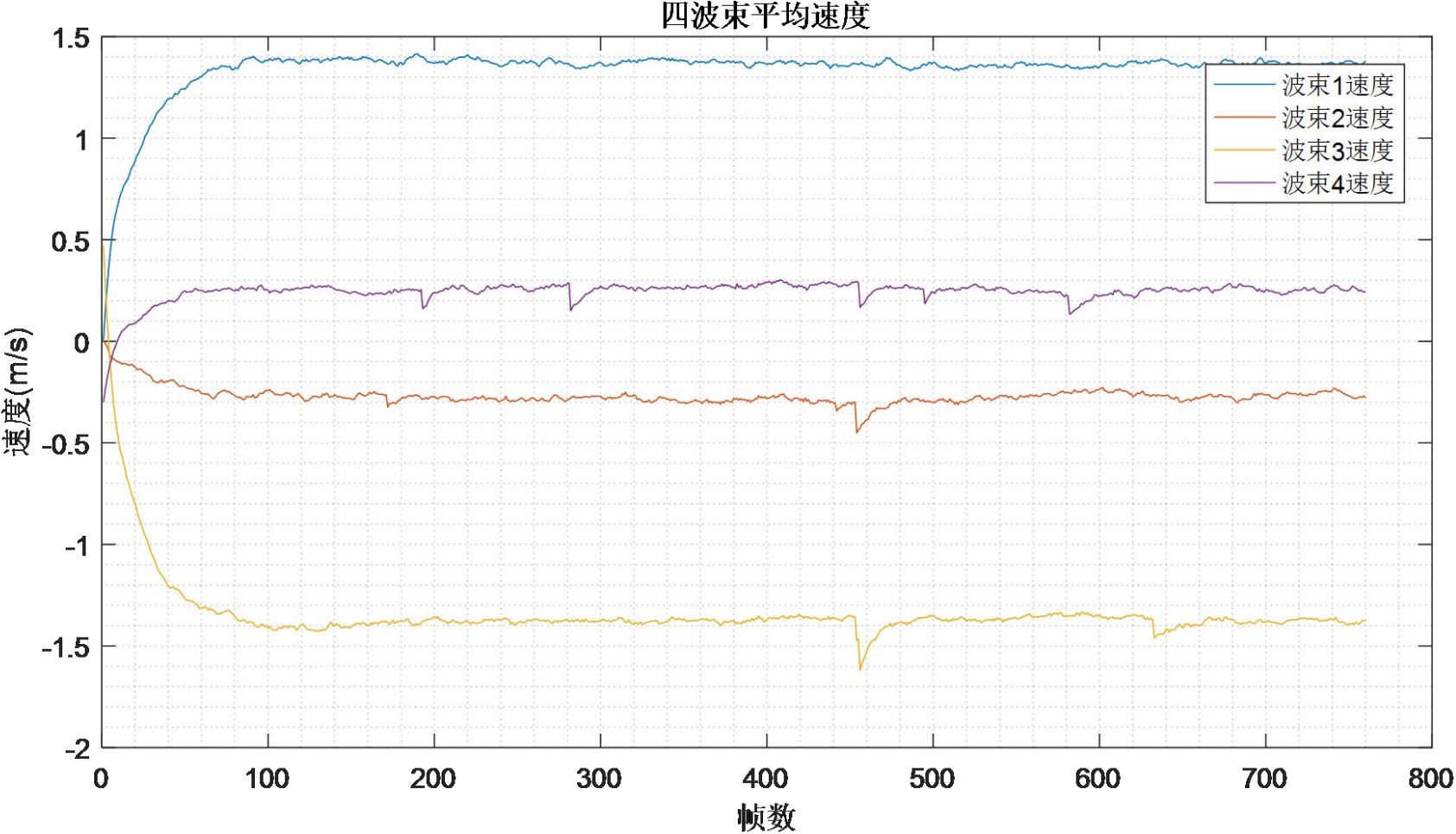
图21:波束坐标下速度计算结果
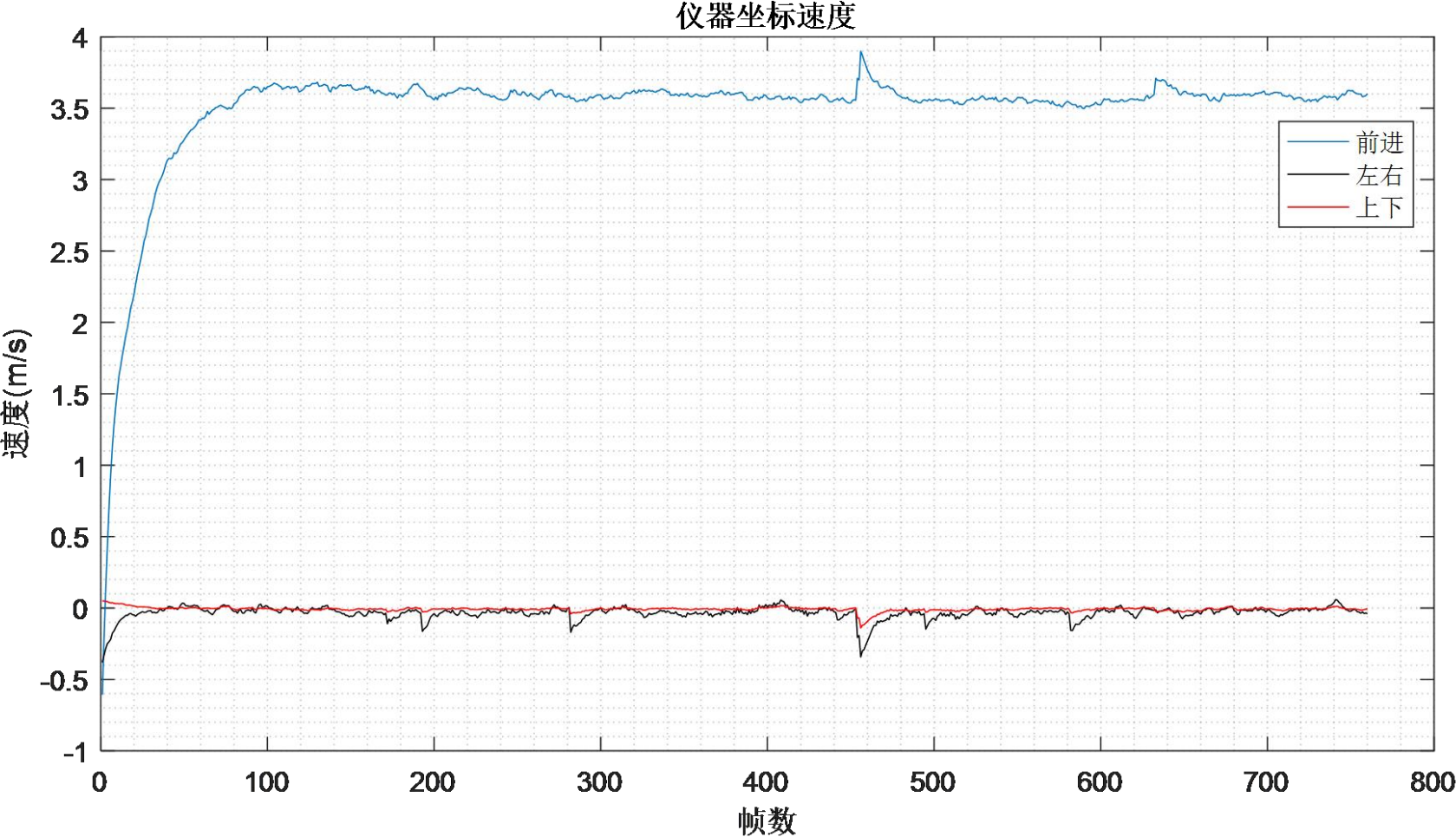
图22:仪器坐标下速度计算结果
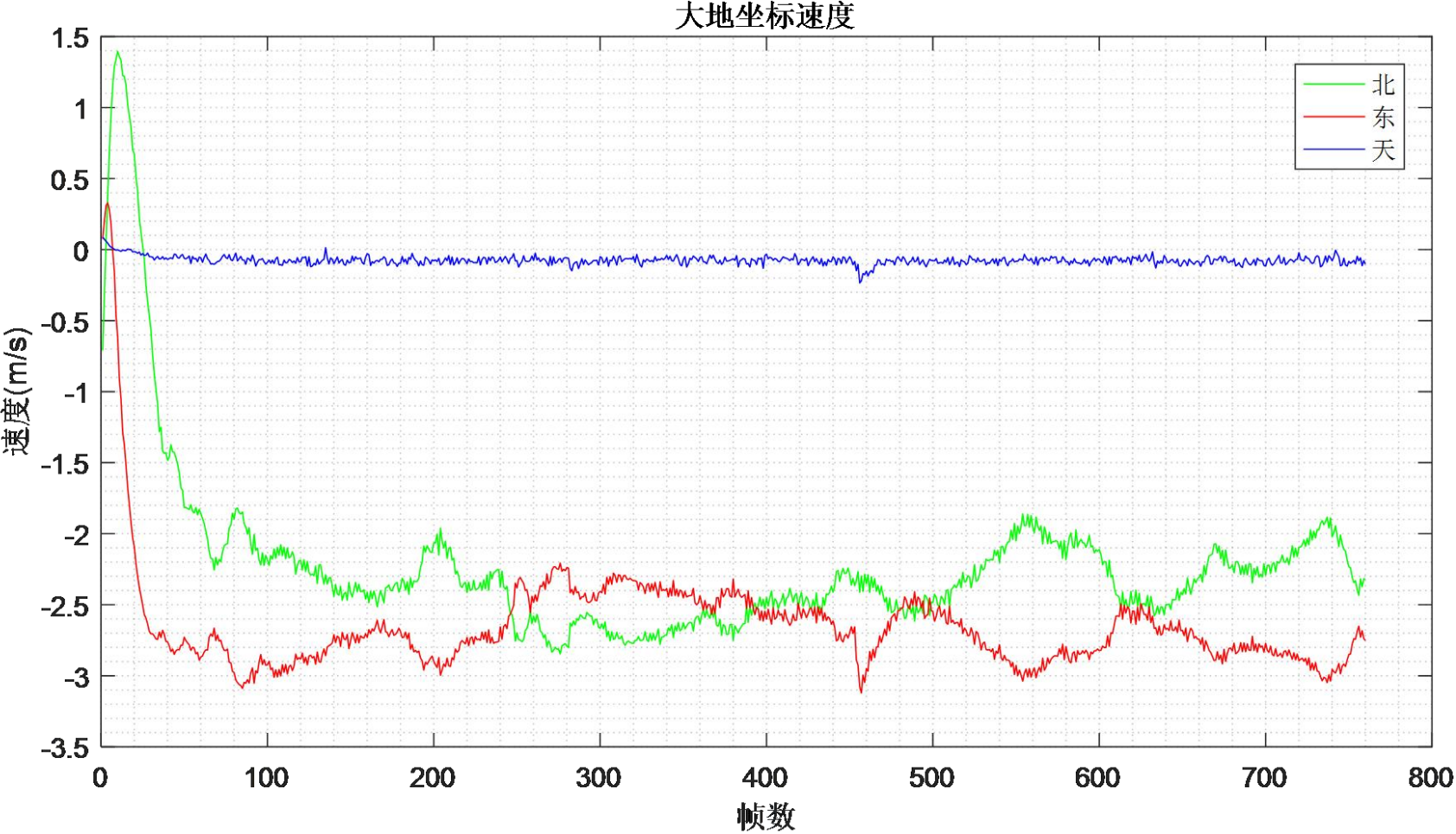
图23:大地坐标下速度计算结果
从图20~23中可以看出,航线 1 过程中,DVL-600K 计算的波束坐标、仪器坐标和大地坐标下的速度稳定,且与实际的船速基本一致,可以证明本设备具有稳定、精确地测量速度的能力。

图24:DVL 与 GSP 航程比对结果
从图24中可以看出,航线 1 过程中,DVL-600K 计算的航程(红色)与 GPS (绿色)记录的航程基本一致,经计算总航程 2708.2m,两者终点偏差 5.2m,相 对误差为 1.9‰ ,足以证明本设备具有精确的航程计算能力。
航线2和3:
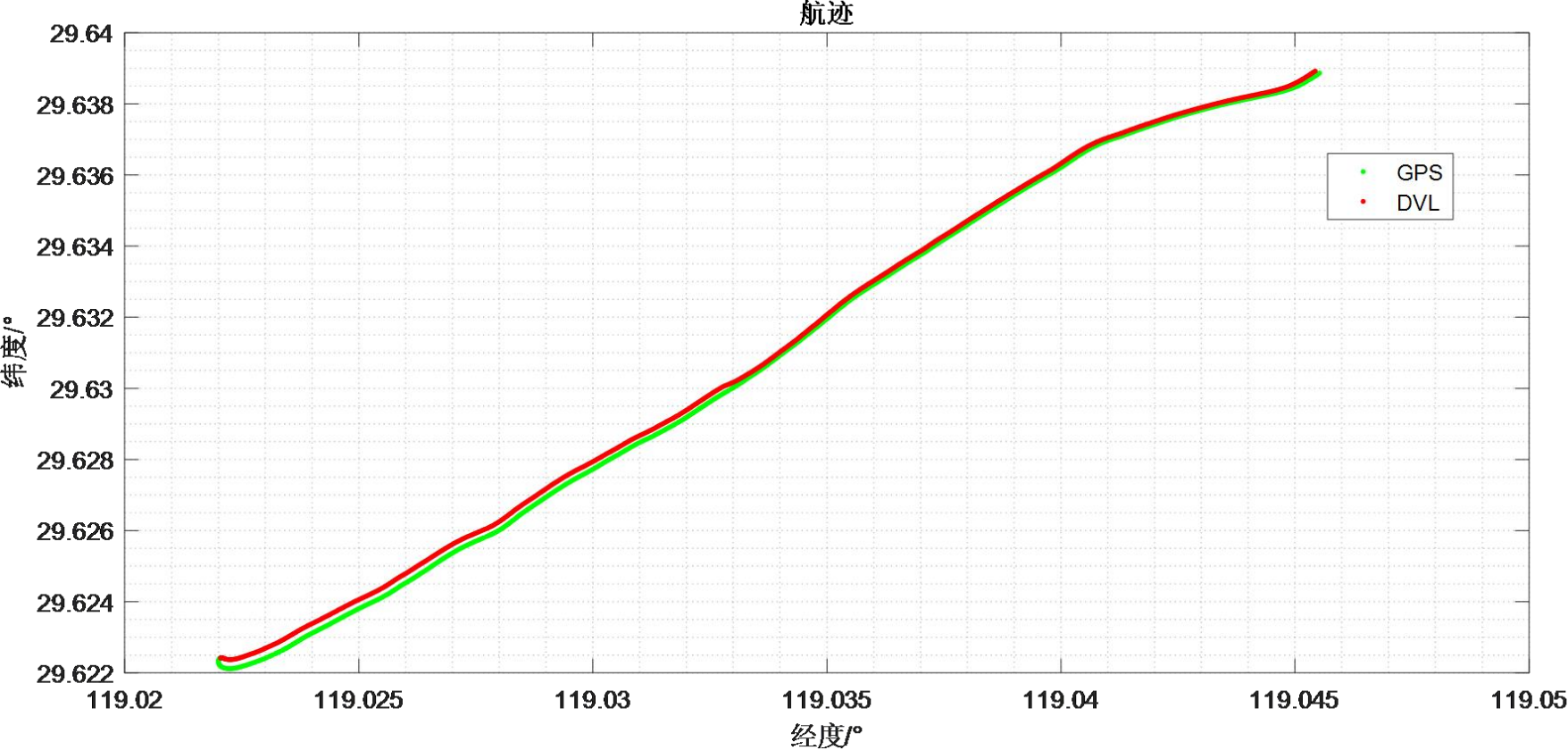
图25:航线 2 DVL 与GSP 航程比对结果
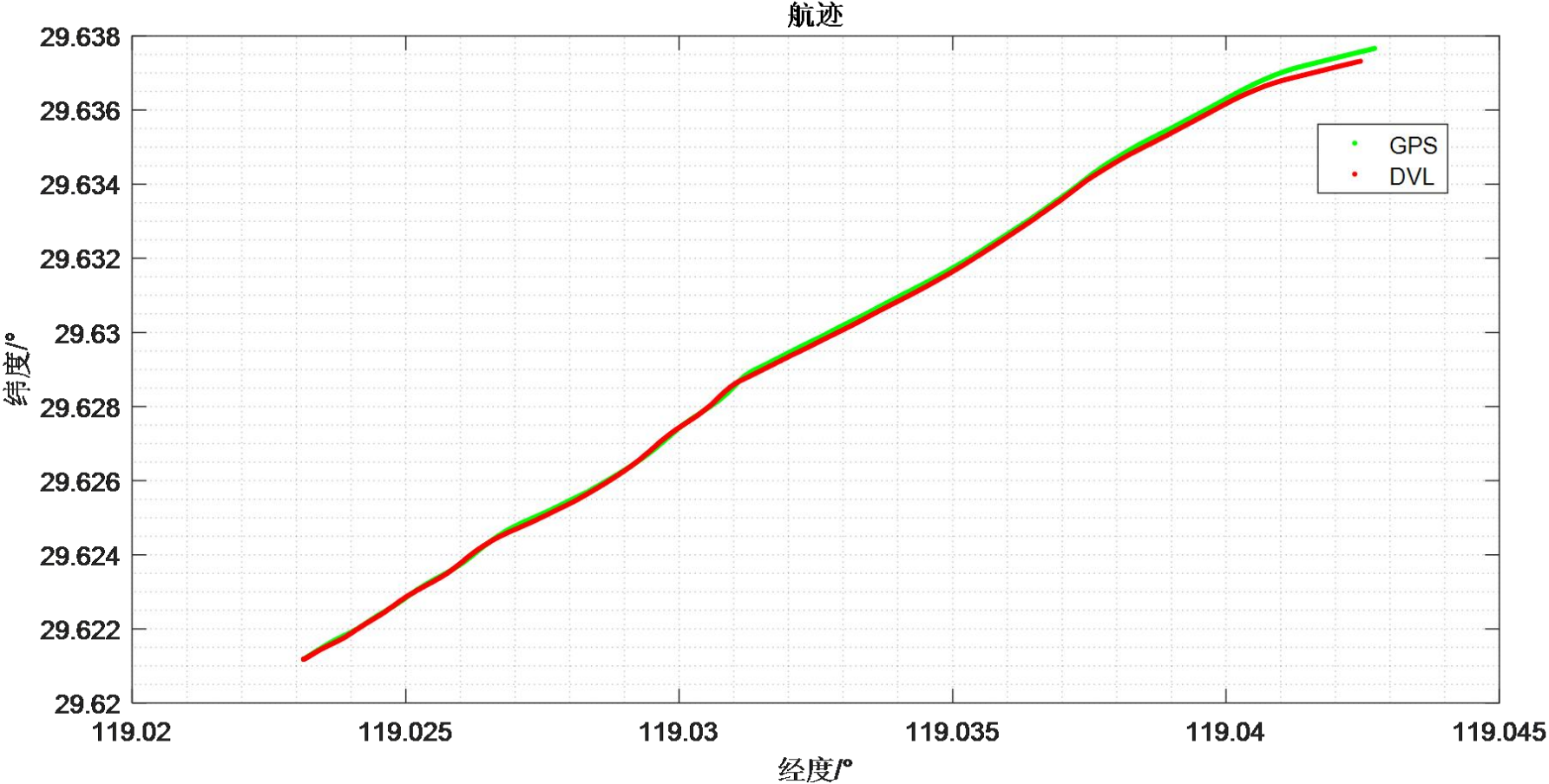
图26:航线 3 DVL 与 GSP 航程比对结果
从图 25和26中可以看出,航线 2 和 3 过程中,DVL-600K 计算的航程(红 色)与 GPS(绿色)记录的航程基本一致,经计算总航程分别为 2998.2m 和 2656.1m, 两者终点偏差分别为 5.2m 和 7.5m,相对误差分别为 1.7‰和 2.8‰,可以证明本 设备具有精确的航程计算能力。
六、试验总结
两台 DVL-600K 设备分别采用 1 号波束与船前进方向成 45 °夹角和 0 °夹角的安装方式,各完成 3 条航线,分别对两台设别的底跟踪能力、测速精度和航程计算精度进行测试,测试结果如下:
(1)6 条航线下,两台设备面对湖底高度变化剧烈的情况下依然准备、连续地跟踪到湖底,说明设备具备稳定跟踪复杂海(湖)底的能力;
(2)6 条航线下,两台设备计算的波束坐标、仪器坐标和大地坐标下的速度稳定,且与实际的船速基本一致,说明设备具备稳定、精确测速的能力;
(3)6 条航线地航程分别为 6458.3m、2575.6m、2848.1m、2708.2m、2998.2m 和 2656.1m,与 GPS 地航程计算误差分别为 2.9‰、2.4‰、2.7‰ 、1.9‰ 、1.7‰ 和 2.8‰ ,均小于 3‰ ,达到设计要求,满足高精度 DVL 的使用要求。



